AWSグループ ふじはらです。 本記事は Kiro 徹底検証:Vibe vs Spec モードでポモドーロタイマーを作ってみた の後半になります。 ぜひ、前半の記事からご覧ください。
前回は Vibe モードでの実行結果を確認しましたので今回は Spec モードを試してみます。
4. Spec モード実行結果
Specモードの場合、都度、確認が入るので手直しがこまめにできますが、今回はVibe モードの結果となるべく近い形で比較したいので、基本的に次へ次へと進めていきます。
- Specモードを選択。

- 開発条件を揃えるため、Steeringファイルの内容はVibeモードで作成された内容をコピーしました。
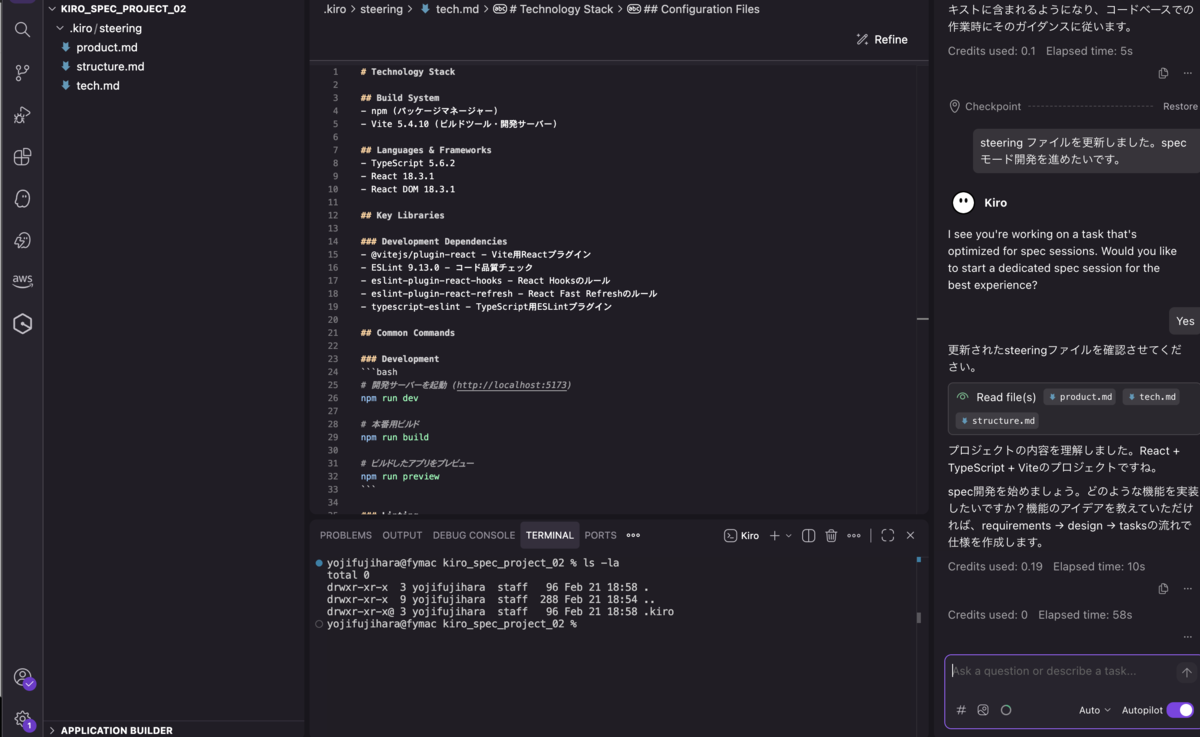
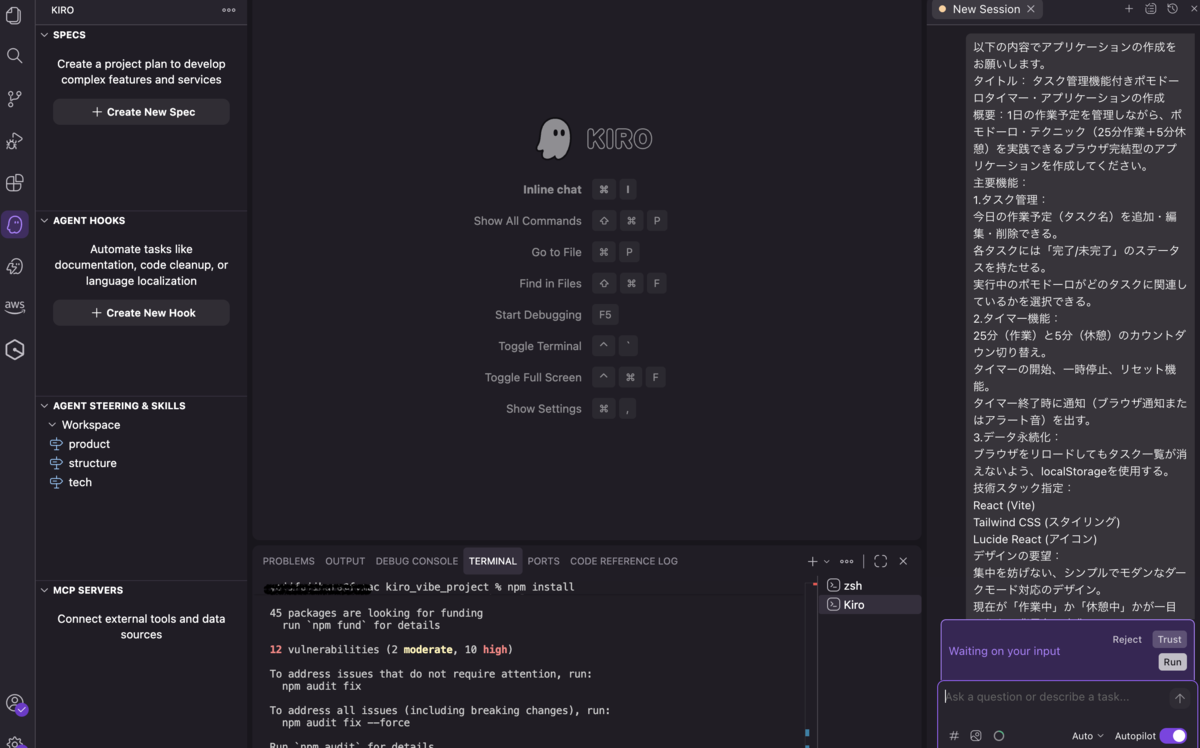
- プロンプトを入力。Vibeモード実行時と同じ内容にします。
- Requiremets (要件定義)の作成。内容を確認後、 kiro に 次に進んでもらいます。

- Design (設計)の作成。アプリの構造や個別処理の動きが定義されてます。こちらも内容を確認後、 kiro に 次に進んでもらいます。

- Tasklist (構築/テスト計画)の作成。どんな順序で作業を進めるか。動作確認まで含めてリスト形式で作成されてます。
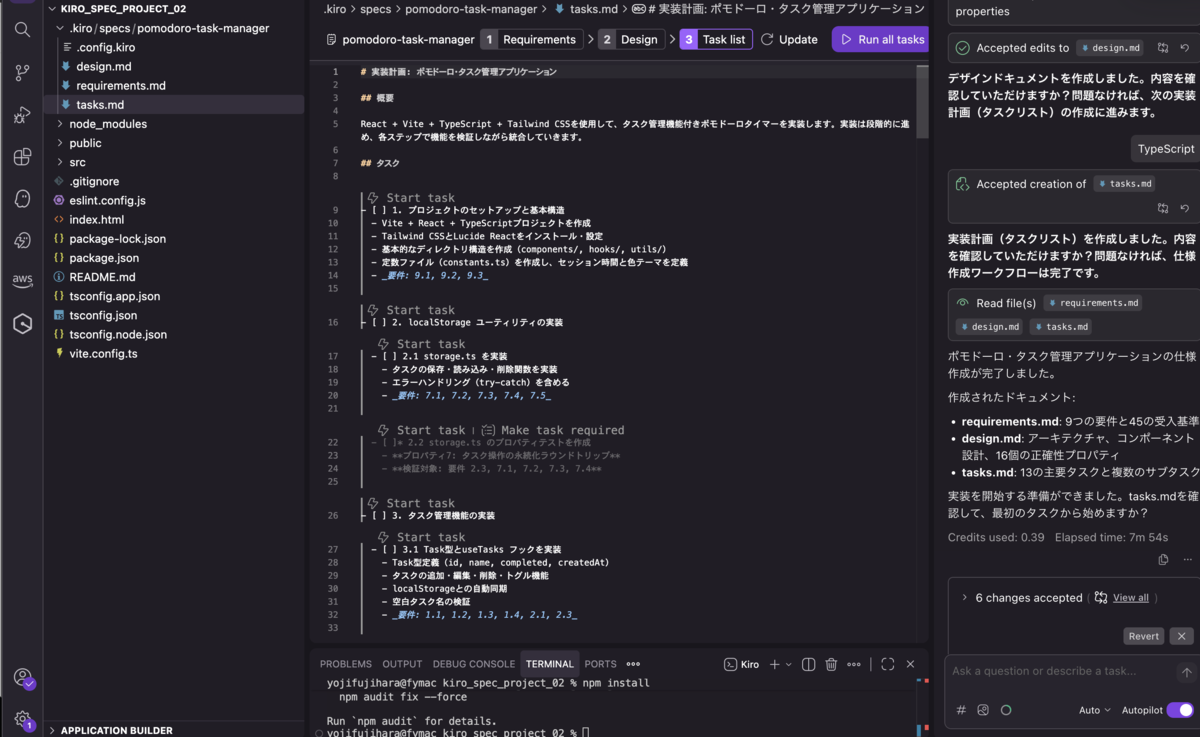
- Tasklist (構築/テスト計画)の実行。最初のタスクをクリックするとkiroが作業を始めます。タスクが終わるとどんな作業をしたか報告してくれます。

- 実装完了。

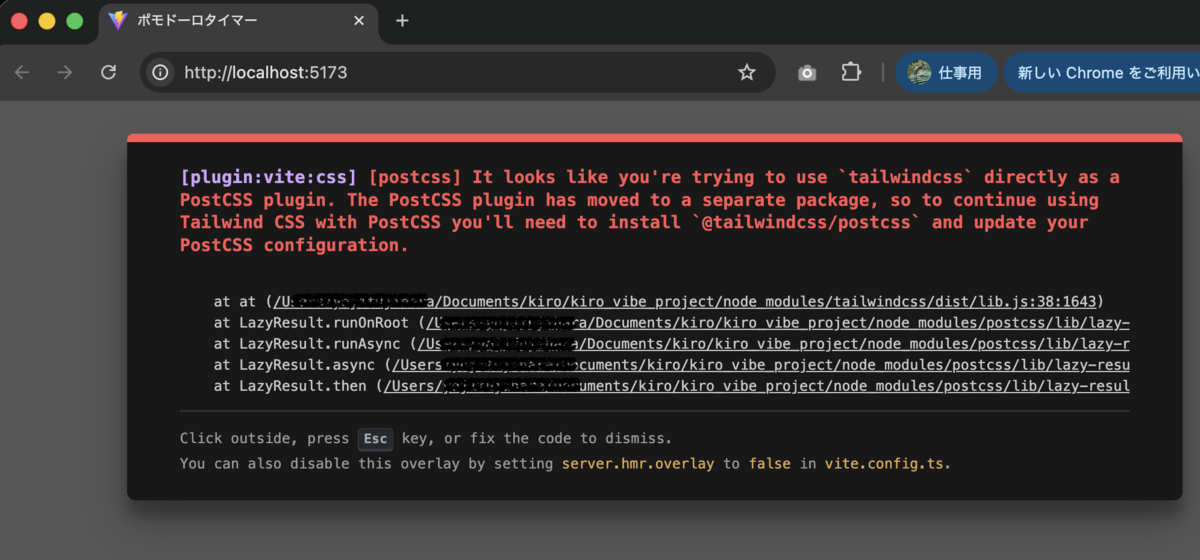
- 動作確認。エラーにならずに起動しました。

- 手動で開始が必要でしたが休憩時間もありました。

🏗️ Specモード:丁寧な設計だが「時間」が必要
- 開発時間: 1時間以上
- プロセス: 要件定義、設計、開発/テスト計画の3段階でそれぞれファイルが作成されます。ステップごとに人間が確認しながら進めるため、非常に堅実です。今回はあえて手直しせず進めましたが、1時間以上を要しました。
- 動作確認:
- タスク管理は完璧。
- 休憩セッション(5分)もしっかり実装されていました。ただし、作業から休憩への自動切り替えは行われませんでした。
- Vibe同様、通知機能や背景色変化までは実装に至りませんでした。
5. 比較まとめ
今回の検証で分かった、各モードのリアルな差がこちらです。
| 比較項目 | Vibeモード | Specモード |
|---|---|---|
| 完了までの速さ | ⭐⭐⭐⭐⭐ (数分) | ⭐ (1時間〜) |
| エラー対応力 | 修正のラリーが早い | 計画段階でエラーを防ごうとする |
| ロジックの正確性 | 抜け漏れが多い | 比較的細かい(休憩時間など) |
| 納得感 | 「とりあえず動く」の感動 | 「設計通り進む」の安心感 |
6. まとめ:Kiroをどう使い分けるべきか?
今回の検証を通して、Kiroは「AIにお任せ」できる部分が多いが、「自分の考え」をいかに伝えるかが大切なツールだと改めて実感しました。
- Vibeモードは、アイデアを形にする最初のステップや、既存コードの軽微な修正に最適です。
- Specモードは、複雑なロジックを組む際や、ドキュメントをしっかり残しながら開発したい本番フェーズで真価を発揮します。
どちらのモードでも、通知機能などの細かいディテールは、プロンプトでの念押しや、生成された設計書(Specモード時)へのフィードバックが必要になりそうです。
次の機会があれば、今回の不足分をSpecモードの「設計フェーズ」で修正指示を出した場合、どこまで完璧に仕上げてくれるかを検証してみたいと思います!
