去る2021年12月17日から19日までの3日間、「全日本学生室内飛行ロボットコンテスト」に参加した。飛行ロボコンへの参加は去年に引き続き2回目だが、主に固定翼機向けの一般部門での参加は初めてだった。思えば5月のチーム結成以来、やたら長い道のりだった。1年の締めくくりとして、チーム結成から大会本番までの歩みを振り返りたい。
本番までの道のり
チームの結成は今年のゴールデンウィークまで遡る。工学部の3年生が2人、2年生が2人で、固定翼機の製作は全員未経験だった。3年生である自分がリーダーを務めることになった。最初の機体のコンセプトとして、先生に助言を頂きながら以下のようなものを目指すことになった。
- 練習機として使い込むため、多少重くても(すなわち飛行ロボコンの重量制限である200gを超えても)頑丈な機体にする
- 設計と製作がしやすくオーソドックスな機体にする
この方針のもと、主翼には作りやすい矩形翼を採用した。翼面積、上反角、主翼取り付け角などの各種パラメータは、最初に先生から頂いた資料で標準的とされる値をそのまま使った。翼型にはド定番と言われるNACA4412を採用した。CADを用いた詳細設計はチームの2年生が行った。主翼には桁を多めに入れて強度向上を狙った。舵は操作しやすいよう大きめに設計した。
機体製作は、要素技術を先生から都度教わりながら全員で行った。設計も含めた製作期間は2ヶ月で、7月中旬に初飛行した。設計から自分たちで行った機体が実際に飛ぶと感動することは想像しやすいと思うが、やはりそうだった。

ところが、試験飛行中に体育館ネットの高い部分に機体が引っかかってしまい、回収不能になってしまった。業者の方を呼んでネットから機体を「取り除いて」もらうことになった。これで1号機は修理不可能なまでにバラバラな残骸になり、初飛行日に運用が終了した。

1号機の失敗を元に、すぐに新たな機体を作る話になった。業者の方や体育館関係者の方々に迷惑をかけてしまった反省から、特にネットに引っかかっていたプロペラと脚について、特徴的な変更を行うことになった。
また、主翼の強度を出すためにテーパー翼を採用した。CAD設計はもう1人の2年生が行った。製作してみると主翼の取り外し機構の強度が圧倒的に足りないことがわかり、諦めて接着した。


9月の頭に初飛行した。翼面積がとても大きいため、滑走を初めてすぐに浮き上がり、フワフワとした飛び方をしていた。また、着陸の際に機首から床に突っ込むということがなく、フワリと安全に着陸することができていた。しかし、飛行試験中に墜落した際、慣性の大きいモーター部分が前に出ようとして、モーターマウンタを支える部分が大破してしまった。

修理をして別の日に飛ばした。修理の影響で上反角が小さくなってしまったせいで、一度機体が左右に傾くとそのまま旋回しながら降りていってしまう状態から抜け出せなくなる、スパイラルという現象が起こるようになった。先生が垂直尾翼を半分ほど切り取ることで垂直尾翼の効きがよくなり、飛ばしやすくなった。逆のように思われるかもしれないが、元々尾翼の舵面積が大きすぎたせいで、大きく舵を切ろうとすると舵面に大きな力がかかり、サーボモーターがリンクを引っ張りきれなくなっていたようである。
また、この2号機の修理と並行して3号機の開発を行っていた。自動操縦を試してみることになり、そのための機体として製作することになった。
- 自動操縦のための電子回路を搭載する
- 主翼を取り外し可能にする
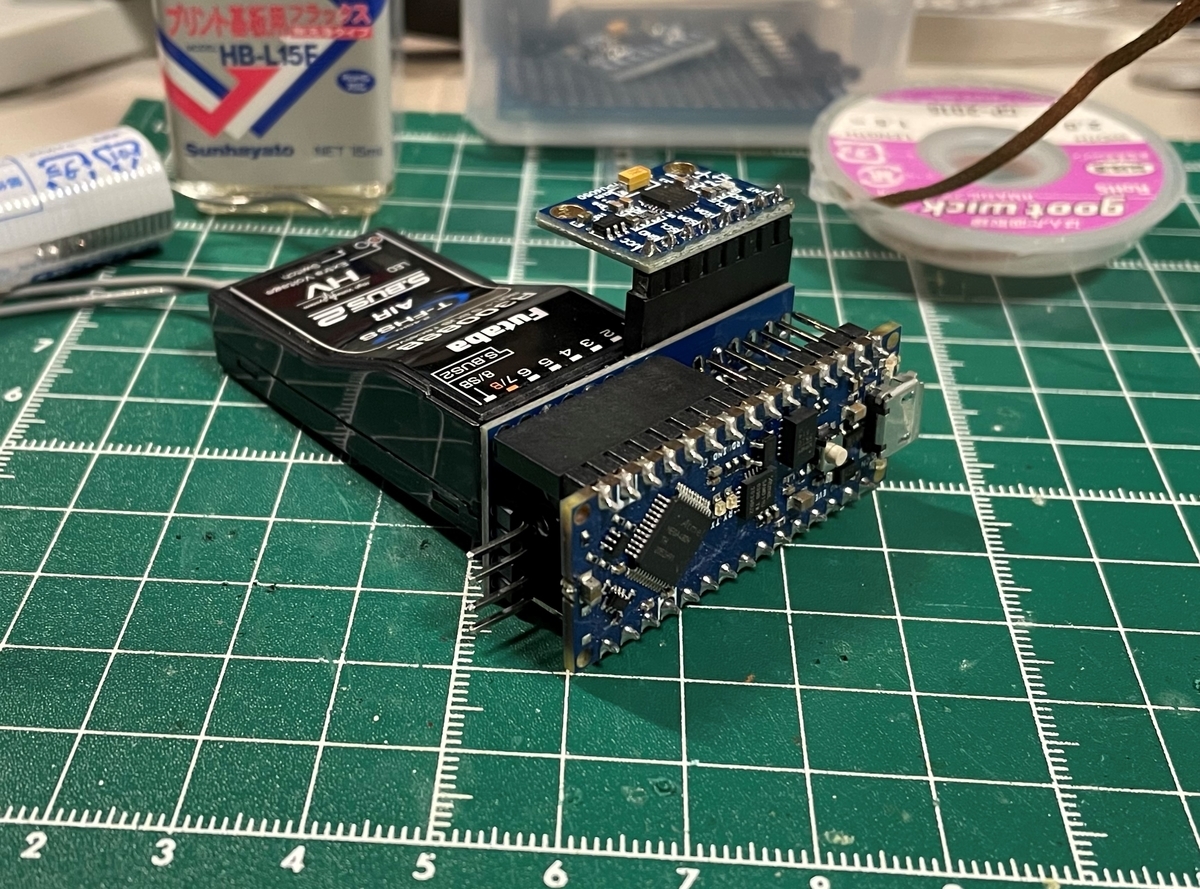
設計者は1号機と同じ2年生。先生からの助言で上反角を大きくつけることになり、20〜25度の上反角をつけて設計した。主翼の取り外しは、リブに開けた穴に胴体から横に生えたカーボンパイプを刺すことで実現した。マイコンとジャイロセンサを搭載した自動制御用回路は、別のチームで先にやっていた方から回路構成と制御プログラムを提供してもらい、自分が回路の実装を行って機体に搭載した。
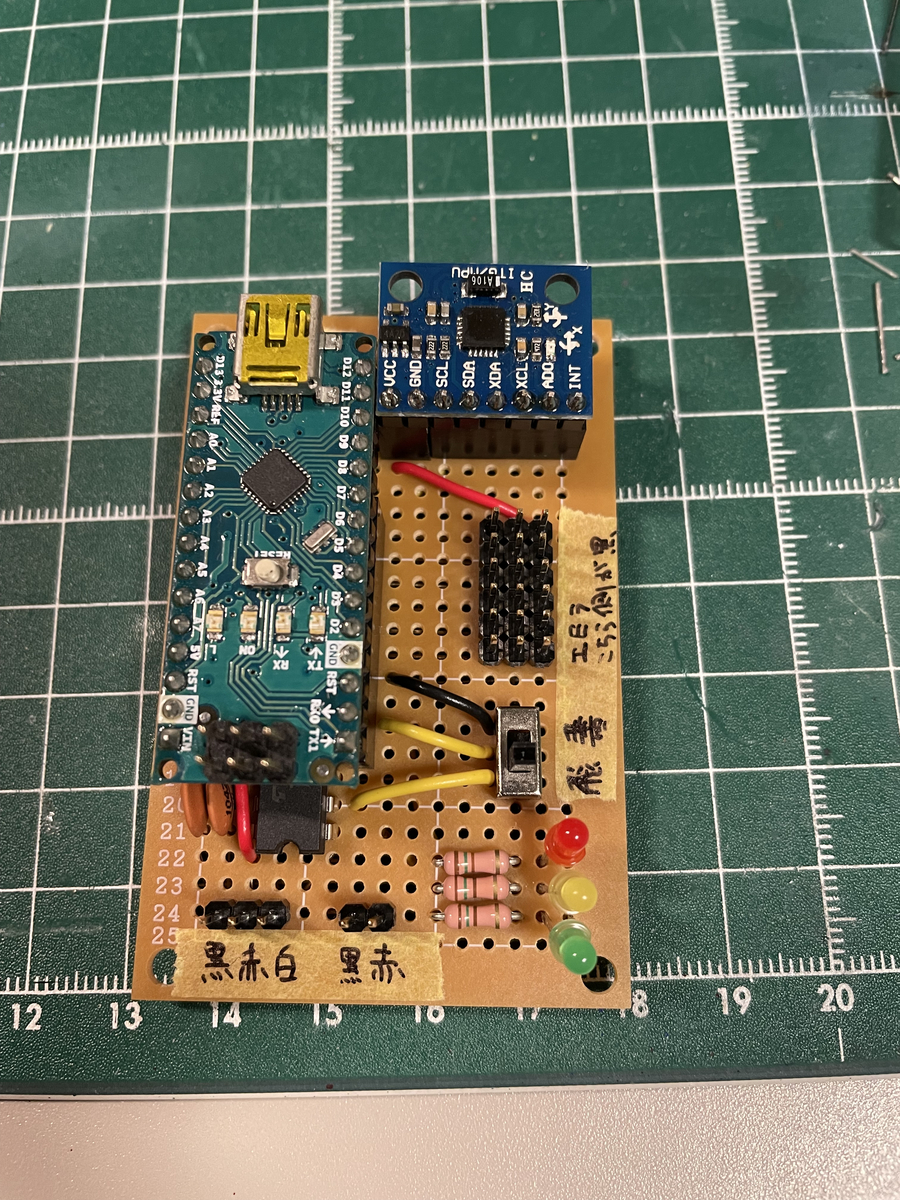
自動操縦は機体のピッチ(前後の傾き)に対して補正を入れるという内容で、プロポのスティックで目標値を与え、ジャイロセンサで機体のピッチを取得し、比例制御で昇降舵を動かして姿勢を追従させるというものである。マイコンにはArduino Nano、センサにはMPU6050を使用している。センサ値の処理にはMPU6050の機能であるDMP (Digital Motion Processor)を用いた。
2号機の修理と並行して3号機の製作が進み、9月の中旬に初飛行した。

操縦者によると手動のみの操縦と自動補正付きの操縦の違いを実感できたようだ。自動制御による操縦補正はチームに必要不可欠なものになった。この段階で超音波センサや気圧センサも機体に取り付ける検討を行ったが、実際に取り付けて飛ばしてはいない。夏休みも終わりに近づき、そろそろ飛行ロボコン本番に向けた機体製作を行っていくことになった。一般部門と自動操縦部門のどちらに出るかで迷ったが、回路と制御を担当できるメンバーが自分だけだったことと、チームに飛行機そのものを作って飛ばすのを思いっきり楽しむ雰囲気があったこともあり、一般部門で出場した方が皆で楽しめると考え、そうした。
秋学期のなか、4号機の開発が始まった。基本的に3号機と同じコンセプトだが、軽量化のために胴体を短くしたり主翼取り外し部分のカーボンパイプを短くしたりしている。また、自動制御用の基板について、自分でプリント基板を設計して発注してみた。テスト用ということで、サーボモーターやセンサを多めに接続できるようになっている。
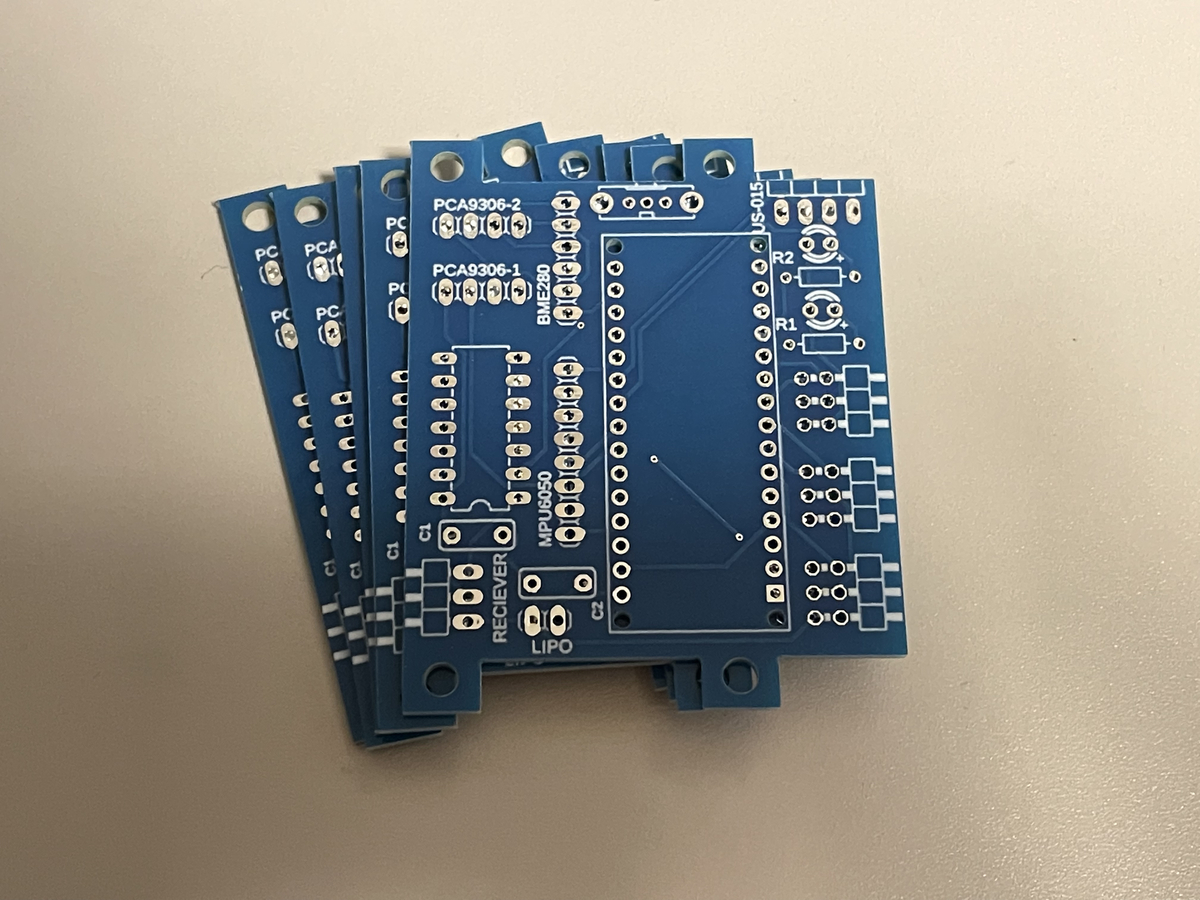
4号機に新しい基板を積み、初飛行を行った。しかし、主翼の取り外し機構の重量削減を攻めすぎたせいで根元の強度が不足していて、先生の操縦で少し浮いたところでバンザイ墜落してしまった。取り外し式を生かして主翼だけ再設計することになった。カーボンパイプを受ける穴の周囲を大きくとって強度を出し、ついでにたまたま作業部屋にあった黒い和紙を貼って4号機改とした。また、新しく設計して発注、実装まで済ませていた一般部門本番仕様の軽量化プリント基板を搭載した。
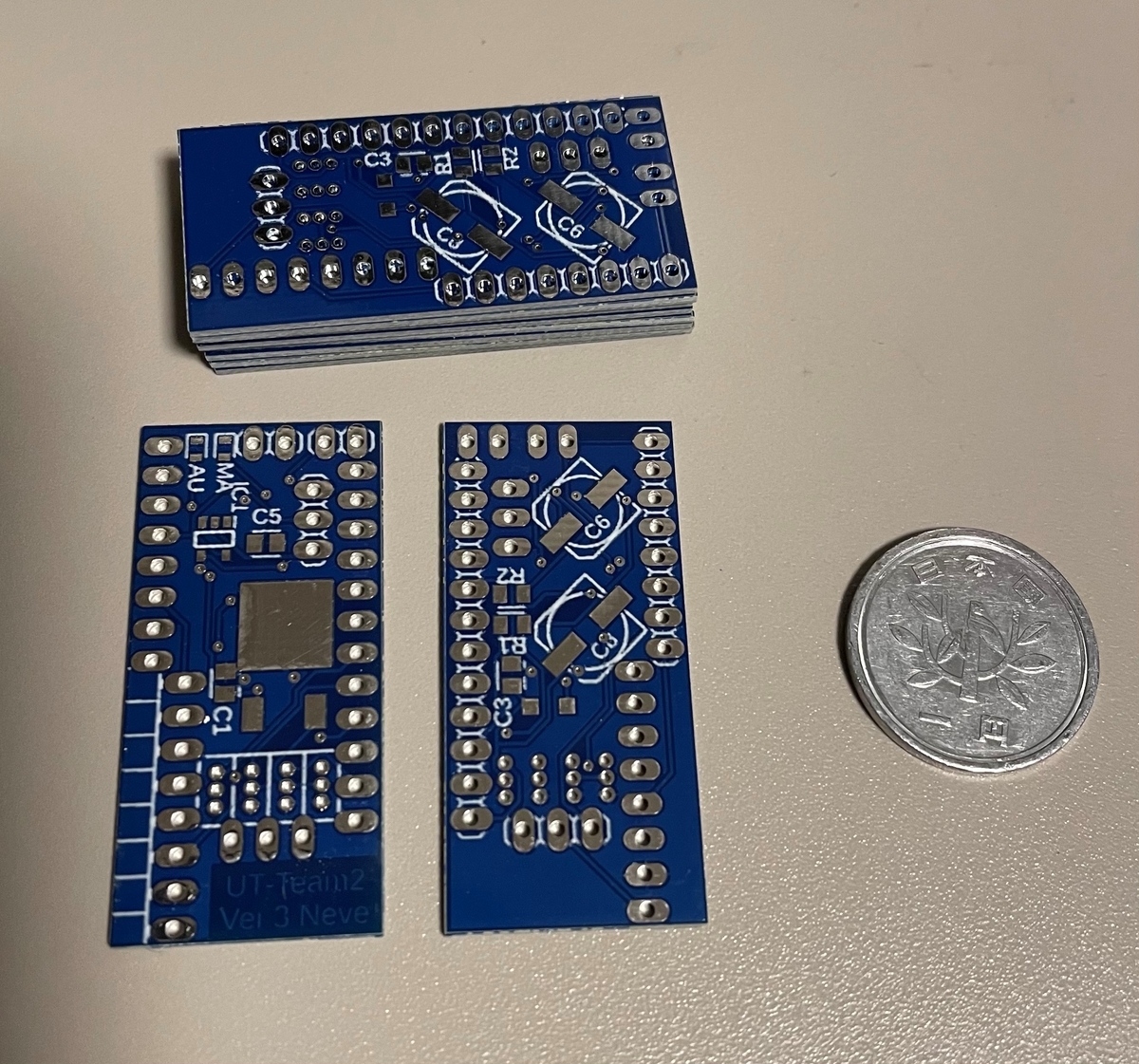
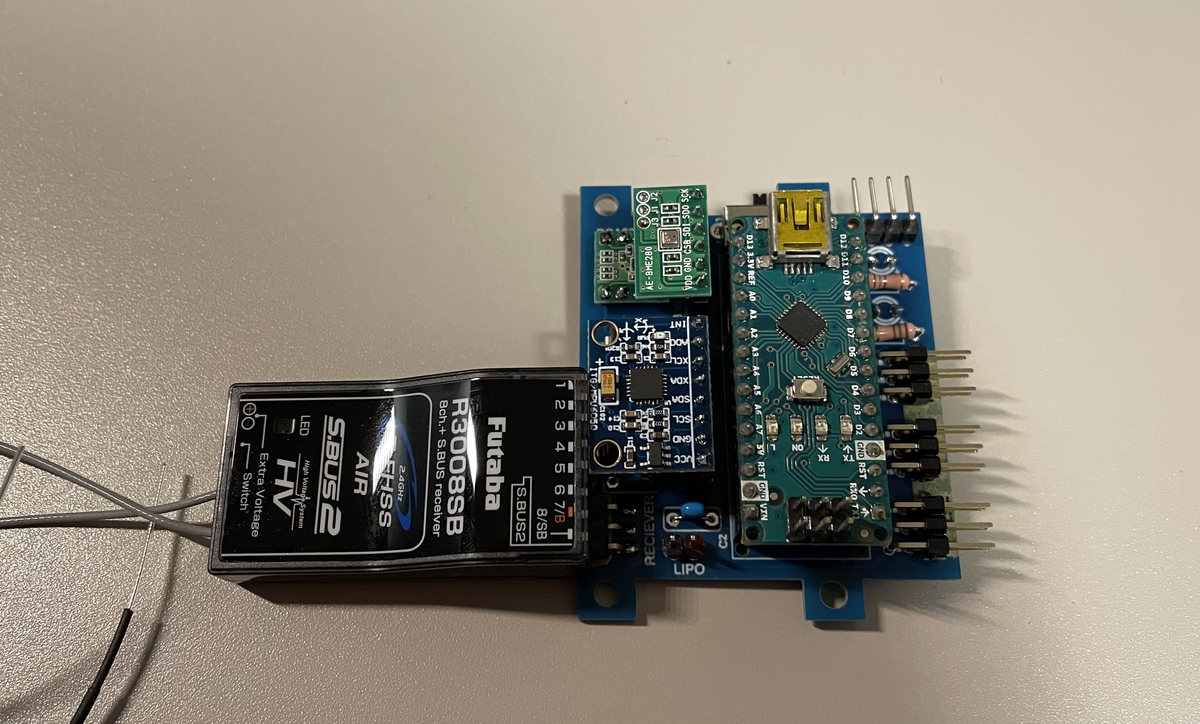
使用マイコンをArduino NanoからArduino Nano Everyに変更している。これによって書き込み時と飛行時のシリアル通信のスイッチ切り替えが不要になり、クロック周波数も16MHzから20MHzに若干向上している。基板色も青で統一され、見ていて美しい。ちなみにこの回路のCADデータと制御プログラムは近日中に公開する予定である。

外形がすっきりまとまるように、受信器の取り付け位置も含めて設計している。
4号機改は自動操縦のおかげもあって非常に良く飛び、大会運営に提出する機体審査用紙と1分間の飛行動画をこの機体で用意できた。重心がやや後ろ気味で縦安定が弱いという問題はあった。
本番機
大会まで残り1ヶ月程度になり、いよいよ本番機(5号機)の製作が始まった。基本的に4号機と同型だが、少し変更点がある。
- 本番の目張りされていないシートに引っ掛からないスキッド脚を採用
- 主翼の主桁が翼型の空力中心を通るようにテーパーを空力中心に揃えた
- 水平尾翼のヒンジを後退させて舵面積を小さくした
- 機首にバッテリー搭載スペースを設けて重心を前に動かした
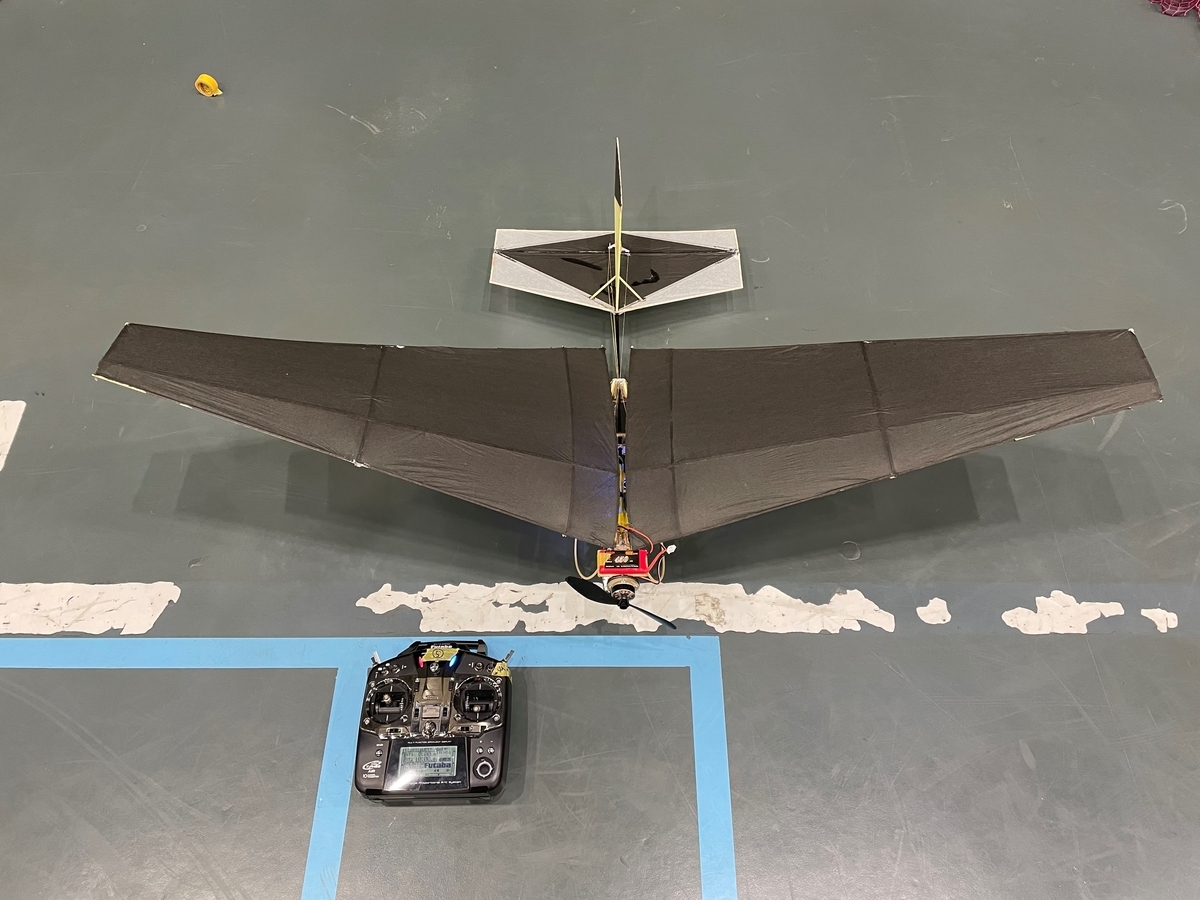
スキッド脚には竹ひごを沸騰したお湯につけて曲げ加工したものを使用した。主翼付け根に接着してあるので、前から見ると上反角の分だけハの字に開いている。


受信器をSBUS端子しかない軽量小型のものに載せ替えた。これだけで6g軽くなった。程なくして本番機が完成した。
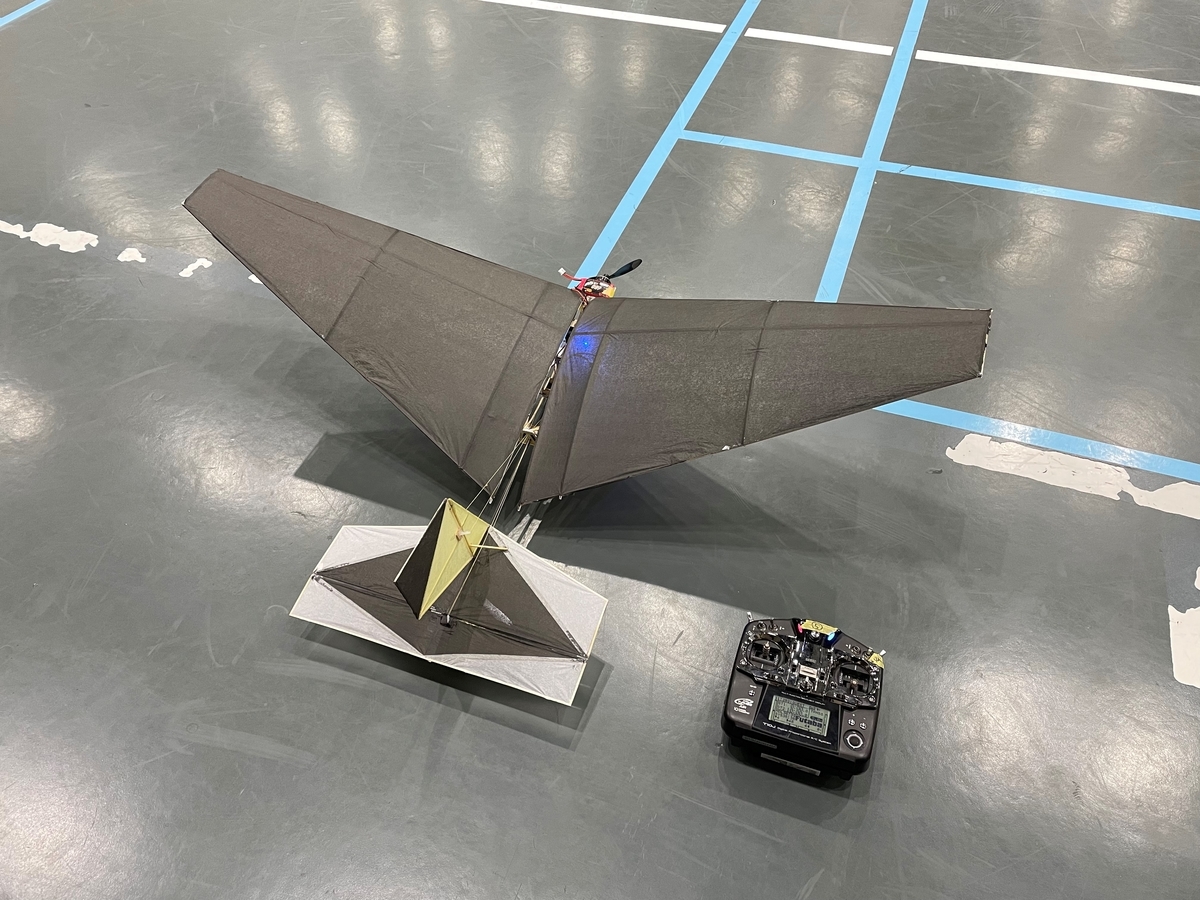
飛行試験は大成功。今までで一番安定した綺麗な飛び方で、心の底から感動した。4号機の課題だった縦安定が、重心を前に出したことで見事に改善されている。ここまで綺麗だと手動と自動の飛び方の違いも顕著に表れていた。
2点改造を行った。まず、離陸前に機体が前のめりになってしまう問題をスキッドの前に付加物を取り付けることで解決した。

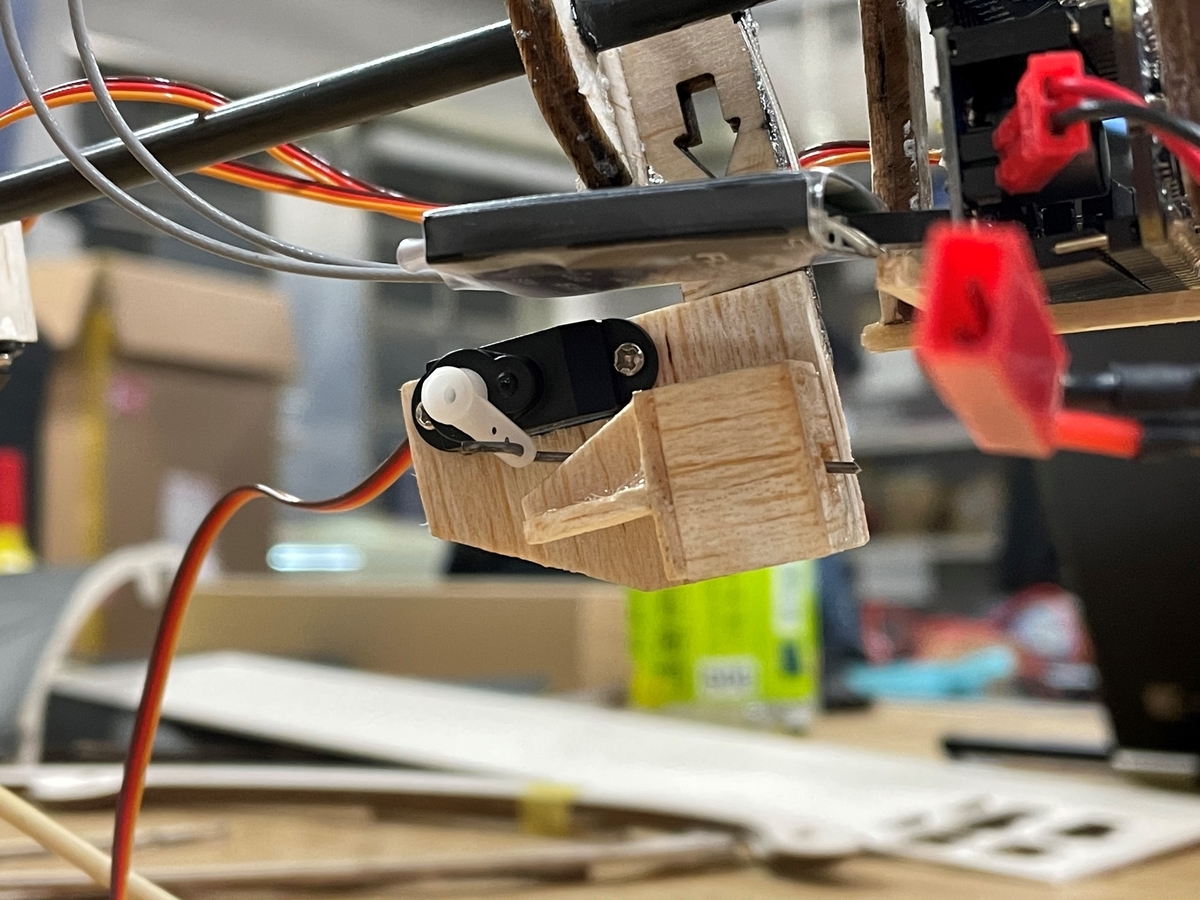
また、チキンラーメンの投下装置を製作して取り付けた。穴を貫通する針金をサーボモーターで抜き差しする機構を採用し、保持と投下を確実に行えるようにした。また、サーボモーターにチキンラーメンの荷重がかからないようにもなっている。重心の真下に投下点を配置したので、投下しても飛行が乱れにくい。
前日
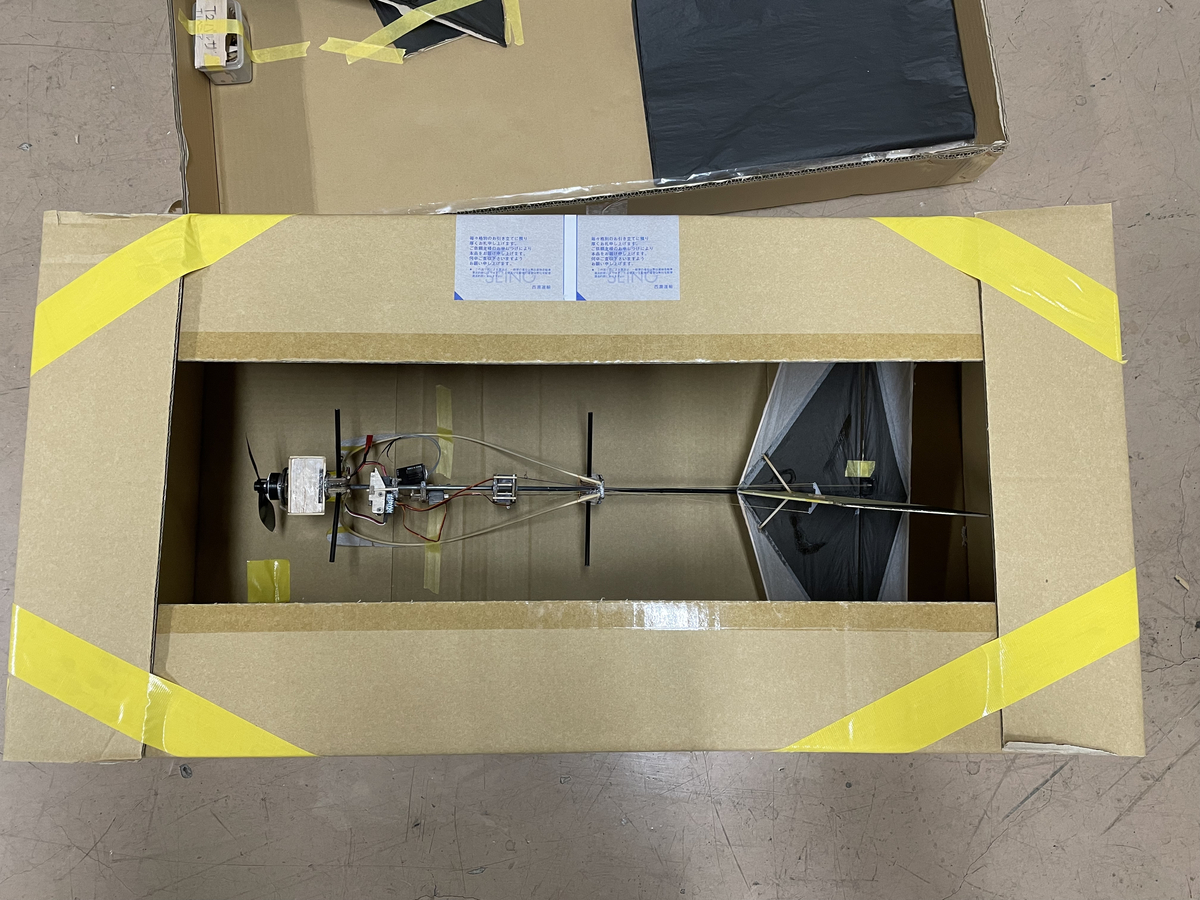
午前中に最後の飛行練習を行った。競技開始から終了までの流れを細かく決めた上で、それに従ってひたすら飛ばしては微修正する練習を繰り返した。練習後3限を受けるために一旦解散し、15時半に再集合した。レーザーカッターで主要部品の予備を全て切り出し、その他必要な部品や工具をまとめてボックスに入れた。機体もサーボと舵のリンク糸の張り直しなどを行った。梱包に関しては、主翼の取り外しが可能なので、胴体を入れる細長い段ボール箱と主翼とその予備を入れる薄くて大きな段ボール箱を確保した。箱には機体や主翼を固定した上で、箱が潰れないように発泡スチロールのブロックを入れて支えとした。
箱に蓋をしてレンタカーに積み込みを行い、20時過ぎにようやく準備が完了した。帰宅後は当日持ち込む機体審査用紙を完成させ、コンビニで印刷した。着替えや自分の私物で持っていく工具類なども準備して、午前1時に就寝した。
1日目
7時起きで大田区総合体育館に向かった。この日程に競技はなく、会場設営、機体審査、飛行練習が行われる。
チームメンバーと合流しつつ設営や審査を済ませた。出発前に最終的な機体重量を量っていなかったが、制限ギリギリの199.0gでなんとか通った。仮に重量をオーバーしていた場合は、剛性は落ちるが軽い予備の主翼に付け替える予定だった。フェイルセーフの設定にミスがあったため、審査の列に並び直している。

午後は他チームの機体を眺めつつ飛行練習を行った。飛行やミッションに関しては特に問題なく行えた。体育館が広いおかげで無動力滑空がやりやすそうだった。しかし、滑走路の滑りが悪くスキッド脚で真っ直ぐ走れないという問題があった。これまでの練習ではツルツルとした体育館の床で走らせていたが、本番では木板でできた滑走路から離陸しなければならない。真っ直ぐ離陸できないと離陸点がもらえないので、解決する必要がある。機体を平らな面に置いて脚の接地部分を観察すると、曲線の具合が左右で微妙に異なるせいで接地点が前後方向にずれていることに気づいた。急遽片側の足をナイフとやすりで削り、接地部分を調整した。その結果、方向舵を右いっぱいに切ることでなんとか真っ直ぐ離陸できるようになった。
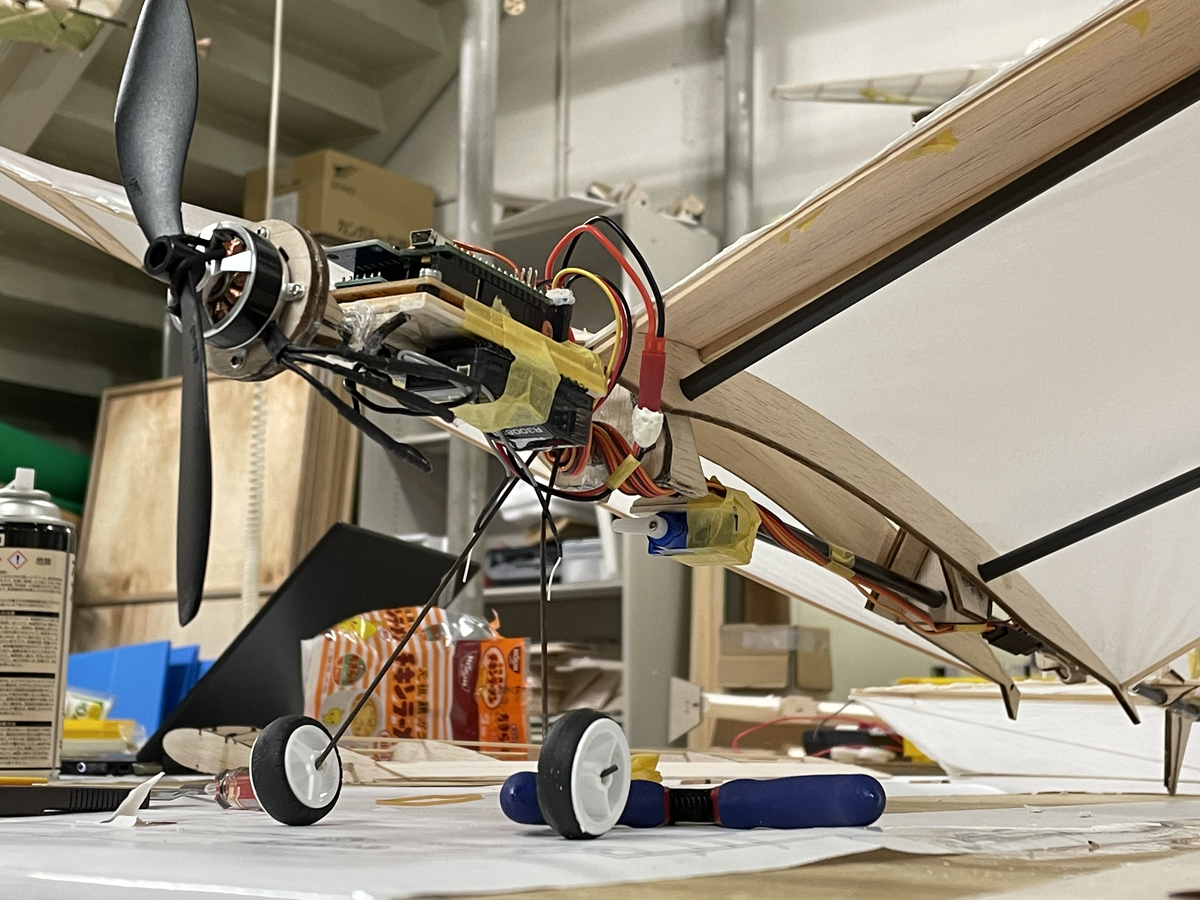
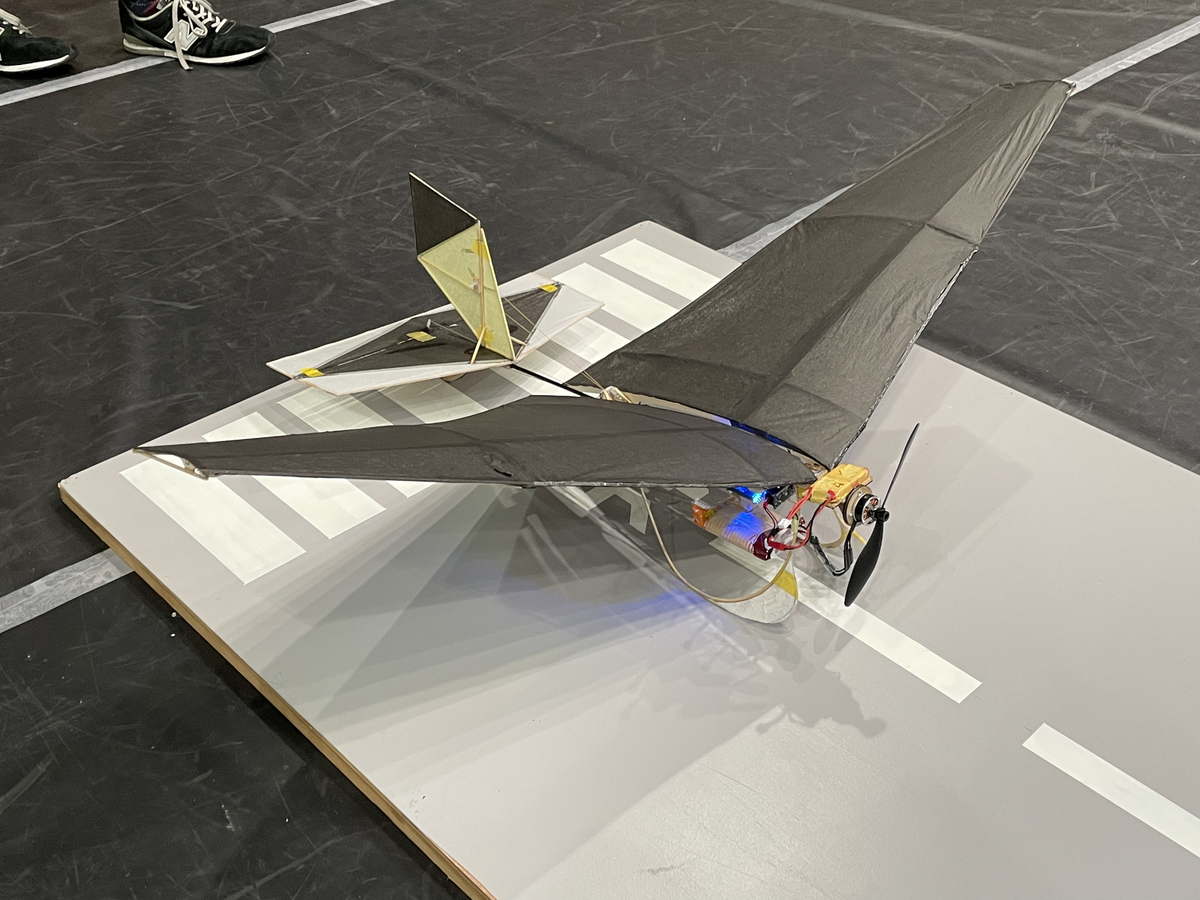
他チームの方々とも少し交流した。自分たちの機体は脚が特徴的なので、よくそれで話しかけられた。また、他のチームは発泡スチロールで翼を作っているところが多かった。テレビの取材でも、我々が和紙で翼面を作っている点が注目された。
予定通り18時過ぎに会場を出て、チーム4人で蒲田駅付近の中華料理店に入った。
晩飯情報です pic.twitter.com/a00541rymi
— よこ (@yokooneesan) 2021年12月17日
京急蒲田から平和島まで電車で移動し、19時半過ぎに大田区の宿泊施設「ゆいっつ」に到着した。青少年自然の家のようなイメージを持っていたが、建物がとても新しく、ホテル並みに綺麗な内装だった。テレビもあった。部屋にゴミ箱やタオルや室内スリッパがないことを除いてはホテルと言っていい。同じ学校のチームと共同で使うLi-Poを充電しながら、4人でずっと雑談をしていた。ユニットバスでシャワーを浴び、0時には寝ていたと思う。
2日目
朝8時半から飛行練習ができるらしいので、7時半に起きてすぐに4人で施設を出た。平和島駅に向かう途中でパン屋に寄り、朝食を買った。大田区総合体育館は京急蒲田駅より梅屋敷駅の方が近いらしく、そこで電車を降りた。会場にはすでに何チームかがエントランス前で人だかりを作っていた。開場までパンをかじって待った。開場後から10時に一般部門の予選が始まるまでの飛行練習で予選の通し練習を行い、離陸含め特に問題がないことを確かめた。予選は「帰還」ができれば突破できるだろうという読みで、チキンラーメンを3つ投下した後は比較的安全な「無動力滑空」だけを行って帰還するという戦略を取っている。また、予選の飛行順が22チーム中最後から2番目なので、他のチームの出来を見てから飛ぶことができる。
予選が始まった。思ったより未帰還になる機体が多い。成功させなくても絶対に予選通過できる高難易度ミッションにわざわざ挑戦した結果未帰還になるケースなど、戦略的に失敗しているチームが思ったより多かった。予選の宙返り回数の上限が1回なのを知らないのか2回、3回と宙返りして時間をロスする機体も見られた。軽く拍子抜けしつつ自分たちの順番を迎えた。予選通過は自分たちの目標とすることろでもあったので、流石に少し緊張したが、飛行前にスマホを出して機体の写真を撮るくらいの余裕はあった。練習で何度もやったのと全く同じように確実にチキンラーメンを機体にセットして、競技開始を待った。
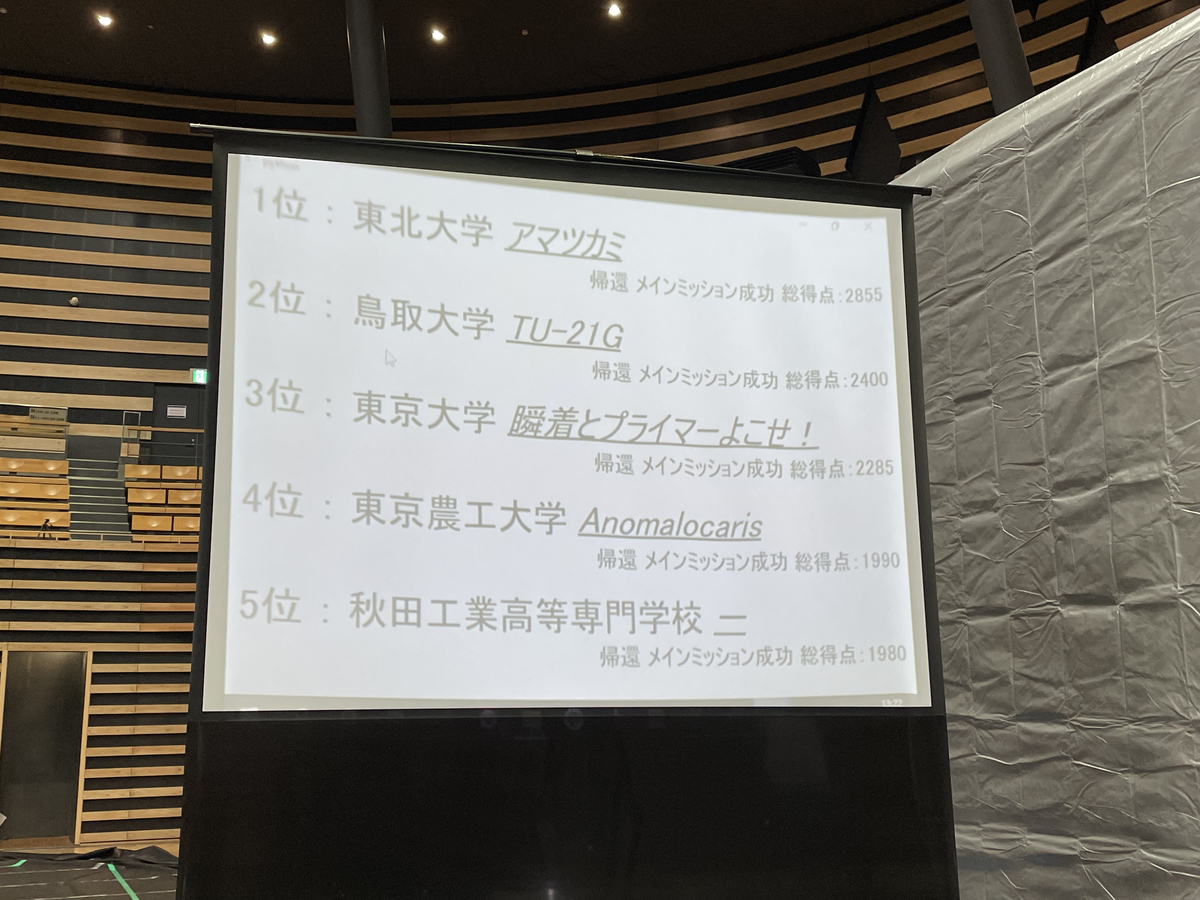
競技開始。問題なく離陸。真っ直ぐ追加点エリアに2つ投下して、向こう側に着陸した。やはり練習通りにチキンラーメンが再装填され、すぐに離陸した。安全をとってエリアの端にある追加点エリアへの投下を諦めていたが、代わりにエリア中央部の追加点エリアに偶然チキンラーメンを投下した。そのままこちら側に着陸し、静止を確認してから無動力滑空を行うために再離陸した。自動入りの安定飛行で綺麗に滑空しているところを眺めてちょっと感動した。ちょうど機首が着陸エリアを向いたところで滑空をやめ、そのまま帰還した。予定していたミッションを全てスムーズに成功させた操縦者が本番に強すぎる。点数計算の結果2285点も取っていたらしい。メチャメチャ驚いた。チキンラーメンを3つ全て追加点エリアに落とせていたこと、落として着陸するまでの時間が37秒と練習でも滅多に出ないようなタイムが出ていたことが効いているようだ。喜び勇んでピットエリアに戻り、昼食をとりに会場を出た。
— よこ (@yokooneesan) 2021年12月18日
昼食から戻ると予選結果が公表されていた。予選通過チームは帰還に成功した10チームと運営側の推薦による1チームの合計11チームだった。上振れを引いたせいで3位という思ってもみない順位で通過してしまった。明日の決勝の飛行順は予選の順位の逆順なので、後ろから3番目である。
午後は他の部門の予選を見たり、明日に向けた飛行練習を行ったりした。大会直前の練習で宙返りをしようとして誤って墜落大破して以来宙返りをやっていなかったが、改めてやってみるとすんなりできてしまったので、決勝では宙返りを3回やることになった。また、チキンラーメン投下の往復タイムを短縮するために2回目の離陸を手投げで行う話が持ち上がった。
日程終了後のらくらと会場を出て、もんじゃ焼きの店に入った。既に目標を半ば達成した我々にとっては最早打ち上げであり、お酒も飲んだ。
— よこ (@yokooneesan) 2021年12月18日
宿泊施設に戻り、今週のウルトラマントリガーを視聴した。明日Li-Poを使うチームは我々だけになったので、半分ほどのLi-Poは満充電ではなくストアにした。
3日目
チェックアウトがあるので心持ち早めに起きた。荷物を全部持って施設を出た。一般部門の決勝は午後の最初に行われる。昼食はその後になると思われるので、コンビニで朝ご飯を多めに買って会場入りした。午前中にユニークデザイン部門とマルチコプター部門の決勝が行われた。去年一緒にマルチコプター部門に出て残念な結果に終わっていた友人が生まれ変わった機体で準優勝を果たした。本当におめでたい。
決勝前の飛行練習で宙返りを行ったところ、主翼に負荷がかかる復帰のタイミングで両翼とも根元から折れて墜落してしまった。一瞬の出来事だった。急いで機体を回収し、胴体の修理と予備翼への交換を行った。主翼を取り外し式にした上で予備の主翼を持ち込んでおいて、本当に正解だった。これが最後の飛行になるので、取り外し式の主翼を瞬間接着剤で固定して本番を待った。予備翼は軽いので、192.5gで機体審査を通過。決勝が始まり、下位通過の機体を眺めながら順番を待った。いくつかのチームが我々には取れない高得点を出していたが、そりゃそうでしょという感じだった。どのチームが何点取ろうが我々のすることに変わりはない。1チーム前の農工大の機体が飛んだ。練習でも予選でもパッとしたものを見られていなかったが、決勝ではなんと完全に無駄のない経路を高速で飛び回る圧巻のフライトで、5000点近い点数を叩き出してしまった。あんなものを見せられてしまったら最早自分たちがすべきことは何もない。完全にリラックスした状態で本番を迎えることができた。ちょっと危なかったが離陸は成功、チキンラーメンを追加点エリアから外してしまった。手投げ発進はうまくいき、タイムを予選より短縮することができた。無動力滑空と宙返りは普通に成功し、予定通り帰還した。2950点。お疲れ様。6位だった。追加点エリアからチキンラーメンが外れたせいで順位が低めに出てしまったのが少し残念だが、正直なところ農工大の飛行以外はどんぐりの背比べに思える。あれに勝てないなら興味はない。
閉会式前の自由飛行会で、初めて本番機を自分で操縦して飛ばした。本当に飛ばしやすくていい機体だった。表彰式、結局賞は貰えなかったが、十分に充実した大会だった。
振り返りと今後
固定翼機初出場にしては良い結果を残せたと思う。最後の1週間で本番を想定した練習をしっかり行えたのもチームとして良かった。もう1機作るほどの時間的余裕があればチキンラーメンの回収ミッションにも挑戦できたと思うが、その程度ではあの農工大にどうやっても勝てないだろう。勝ち筋があるとすればうちの大学らしく完全自動化を成功させたいが、難易度が高すぎる。とりあえず次は自動操縦部門での優勝を目指す。一般部門には農工大に勝てるようになるまで出ない。「次は違う勝ち方がしたい」とか言っているチームにそう易々と敗北してはいけない。必ず打ち負かさなければならない。
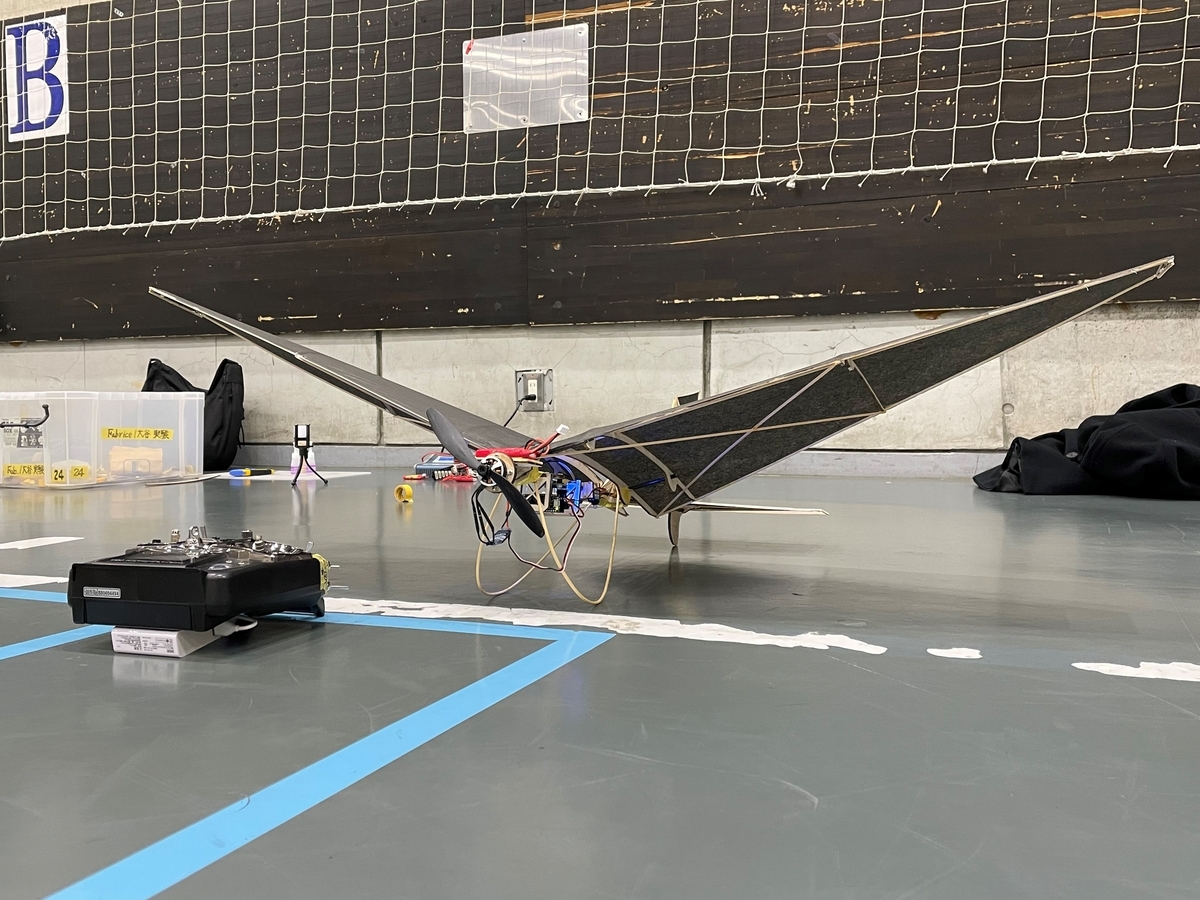
記事の締めくくりとして、練習で友人が撮ってくれた中で一番好きな、今にも飛び立たんとする本番機の写真を載せたい。ありがとうございました。

