The Model Error Compensator (MEC) is a general-purpose method for enhancing the robustness of control systems against disturbances and model errors. MEC adds a simple compensator module — consisting of a nominal plant model and an error compensator — to an existing control system without modifying the original controller. By using high-gain feedback on the model error signal, MEC forces the closed-loop input-output characteristics to approximate those of the nominal model. The method applies to a broad class of plants including nonlinear systems, non-minimum phase systems, and MIMO systems, and can be combined with various control strategies such as PID control, MPC, and state feedback.
For detailed derivations, design methods, and applications to specific system classes, see the Related Blog Articles section below. Videos, MATLAB code, and research papers are placed at the bottom.
Author: Hiroshi Okajima, Associate Professor, Kumamoto University, Japan — 20 years of control engineering research
This article is based on the following comprehensive papers.
>>(総合論文,計測と制御PDF)モデル誤差抑制補償器を用いた既存制御系のロバスト化 (Free access, J-Stage)
>> H. Okajima, Model Error Compensator for adding Robustness toward Existing Control Systems, IFAC PapersOnLine, Vol. 56, Issue 2, pp. 3998 - 4005 (2023) (Free access, Elsevier)
>> Researchgate (PDF) Model Error Compensator for adding Robustness toward Existing Control Systems
- Related Blog Articles on MEC
- Overview of the Model Error Compensator
- Where MEC Stands in Control Engineering
- Control Simulation of MEC (MATLAB)
- Robustification of Nonlinear Systems with MEC
- Robustification of Non-minimum Phase Systems with MEC
- Examples of Integration with Existing Control Systems
- Comparison between Disturbance Observer and Model Error Compensator
- Relationship between Robust Control and Model Error Compensator
- Application Examples
- Summary and Outlook
- Related Topics
- MEC MATLAB Code (Github)
- Model Error Compensator Videos
- Research Achievements of Model Error Compensator
Related Blog Articles on MEC
Overview & Comparisons
- Internal Model Control and MEC: From IMC to Add-On Robustness — Structural connection between IMC and MEC, with GIMC interpretation
- Two-Degree-of-Freedom Control and MEC: Origin and Extensions — How MEC originates from the 2-DOF control structure
- MEC vs Disturbance Observer: A Structural Comparison — When to use MEC vs DOB, with block diagrams and design guidelines
- MEC + PID Control: Adding Robustness to the Most Widely Used Controller — How to add MEC to existing PID systems without modifying the PID controller
System Classes
- MEC for Non-Minimum Phase Systems: Parallel Feedforward Compensator Approach — Handling unstable zeros with the PFC approach
- MEC for Nonlinear Systems: Robust Feedback Linearization — Output-feedback linearization without exact model knowledge
Research Paper Explanations
- A Design Method of Compensator to Minimize Model Error (JCMSI 2013) — The foundational MEC paper
- MEC with Parallel Feed-Forward Filter (JCMSI 2017) — Extended structure for non-minimum phase and time-delay systems
- MEC Design for Polytopic Uncertainty: LMI and PSO (JCMSI 2021) — Systematic design using LMI optimization
- MEC for Non-Minimum Phase Systems with Polytopic Uncertainties (JCMSI 2022) — Unified CT/DT design for non-minimum phase MIMO systems
Overview of the Model Error Compensator
The control objective of the Model Error Compensator (MEC) is to compensate (enhance the robustness of) the input-output characteristics of the control system so that the input-output relationship becomes as close as possible to the model dynamics. This enables adding robustness against disturbances and modeling errors to existing control systems. The compensator structure is simple and can be used in combination with various control systems. Examples include nonlinear systems, non-minimum phase systems, MIMO systems, and others. It can also be combined with various control methods such as PID control and MPC (Model Predictive Control) to achieve good robust performance.
Note on Terminology: The Model Error Compensator (MEC) is known in Japanese as "モデル誤差抑制補償器" (Model Gosa Yokusei Hoshōki). Both terms refer to the same control methodology and are used interchangeably in academic literature.
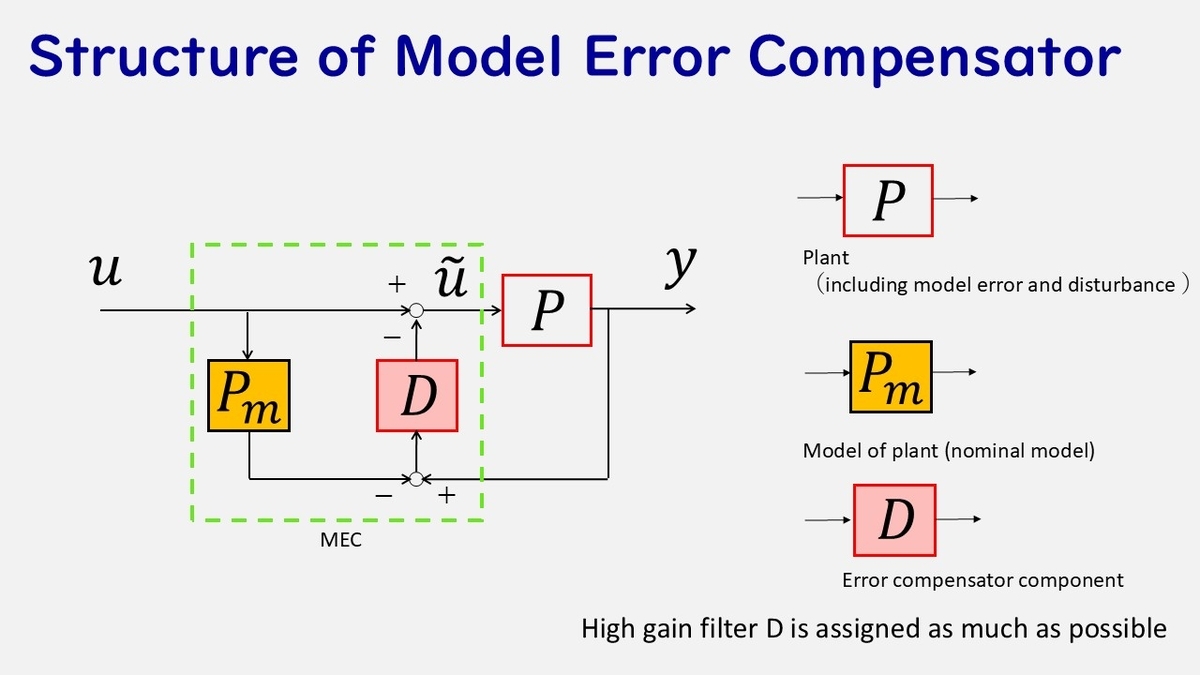
As shown in the figure, MEC consists of a simple compensator structure comprising Model Pn and the Error Compensator D. The MEC module takes the plant input u as input and computes the model output ym = Pn u. The model error signal e = y − ym, which represents the difference between the actual plant output and the model output, is then fed to the error compensator D. The compensator output is added to the control input, forming a feedback loop around the model error. Because this structure uses the difference y − ym rather than the inverse of the plant model, MEC does not require an inverse model — a key advantage over disturbance observer (DOB) approaches.
For the simplest case of a SISO, relative degree 1, minimum phase plant, the error compensator D can be configured with simple high-gain feedback, making it possible to bring the effective input-output characteristics close to those of the model. As the gain of D increases, the model error signal is driven toward zero, and the plant output approaches the model output. Even for more complex classes of plants, the basic approach is high-gain feedback, and design methodologies based on trade-offs between robustness and noise sensitivity have also been established. For the detailed mathematical formulation including the closed-loop transfer function analysis, see the foundational paper explanation (JCMSI 2013).
The figure shows an example of control using a feedforward compensator, where compensation with MEC can be seen to suppress the effects of variations in plant dynamics.
Where MEC Stands in Control Engineering
MEC belongs to a family of model-based compensation methods that use the difference between model output and plant output to enhance control performance. Understanding MEC's structural connections to related methods clarifies its unique advantages and design philosophy.
Connection to Internal Model Control (IMC): MEC can be interpreted as an add-on robustness enhancement within the Generalized Internal Model Control (GIMC) framework. While standard IMC (M. Morari and E. Zafiriou, Robust Process Control, Prentice Hall, 1989) redesigns the entire controller based on a plant model, MEC preserves the existing controller and adds a compensator module. This structural relationship is explained in detail in Internal Model Control and MEC: From IMC to Add-On Robustness.
Origin from Two-Degree-of-Freedom Control: The MEC structure originates from the two-degree-of-freedom (2-DOF) control framework. In a 2-DOF system, the feedback path handles disturbance rejection while the feedforward path shapes the reference response. MEC extends this idea by separating the "model-matching" role into a dedicated compensator that can be added to any existing control system. See Two-Degree-of-Freedom Control and MEC: Origin and Extensions for the derivation and implications.
Comparison with Disturbance Observer (DOB): Both MEC and DOB (K. Ohnishi, "A New Servo Method in Mechatronics," Trans. Japanese Society of Electrical Engineers, Vol. 107-D, pp. 83–86, 1987) aim to reject the effects of model uncertainty, but their structures differ fundamentally. DOB requires an inverse model and uses Q-filters with gain close to 1, while MEC uses high-gain feedback on the model error signal without requiring an inverse model. This makes MEC applicable to non-minimum phase and nonlinear systems where DOB cannot be directly applied. See MEC vs Disturbance Observer: A Structural Comparison for a detailed analysis.
Control Simulation of MEC (MATLAB)
Numerical simulations are shown using MATLAB for unstable plants with parameter variations.
Unstable Plant Example
The plant is:
with and
. The proportional controller is
and the error compensator is:
This PI-type error compensator is chosen with sufficiently high gain (here, proportional gain 50 and integral gain 50) to suppress the model error signal. The integral action ensures zero steady-state model error. For systematic design methods including LMI-based approaches, see MEC Design for Polytopic Uncertainty (JCMSI 2021).
When 10 random parameter variations are applied:
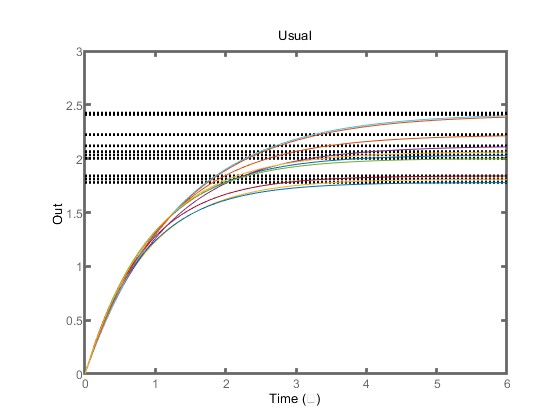

For detailed MATLAB code, simulation setup, and a second example with a 2nd-order unstable system, see MEC + PID Control: Adding Robustness to the Most Widely Used Controller.
Python Simulation of MEC
A free Python simulation is available on Google Colaboratory:
Robustification of Nonlinear Systems with MEC
MEC enables robust feedback linearization for nonlinear systems. Unlike standard feedback linearization, MEC does not require exact model knowledge or full state measurement. It is an output feedback type linearization method.
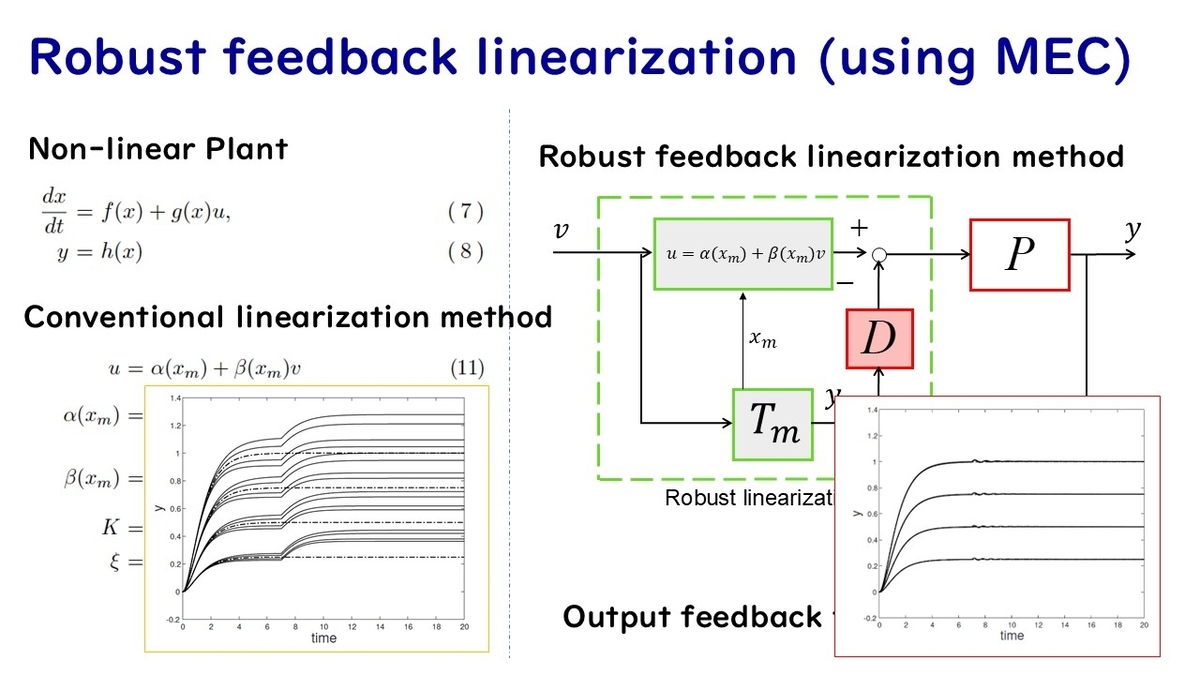
For detailed explanation, applications to vehicle control, and comparison with standard feedback linearization, see: MEC for Nonlinear Systems: Robust Feedback Linearization via Output Feedback
Robustification of Non-minimum Phase Systems with MEC
For non-minimum phase systems, high-gain feedback is difficult due to unstable zeros. A parallel feedforward compensator (PFC) is added to convert the effective system to minimum phase, enabling high-gain error compensation. The PFC is designed so that the sum of the plant and the PFC has no unstable zeros, which requires knowledge of the plant's zero locations (or an uncertainty bound on them). See the paper explanations below for the precise conditions.
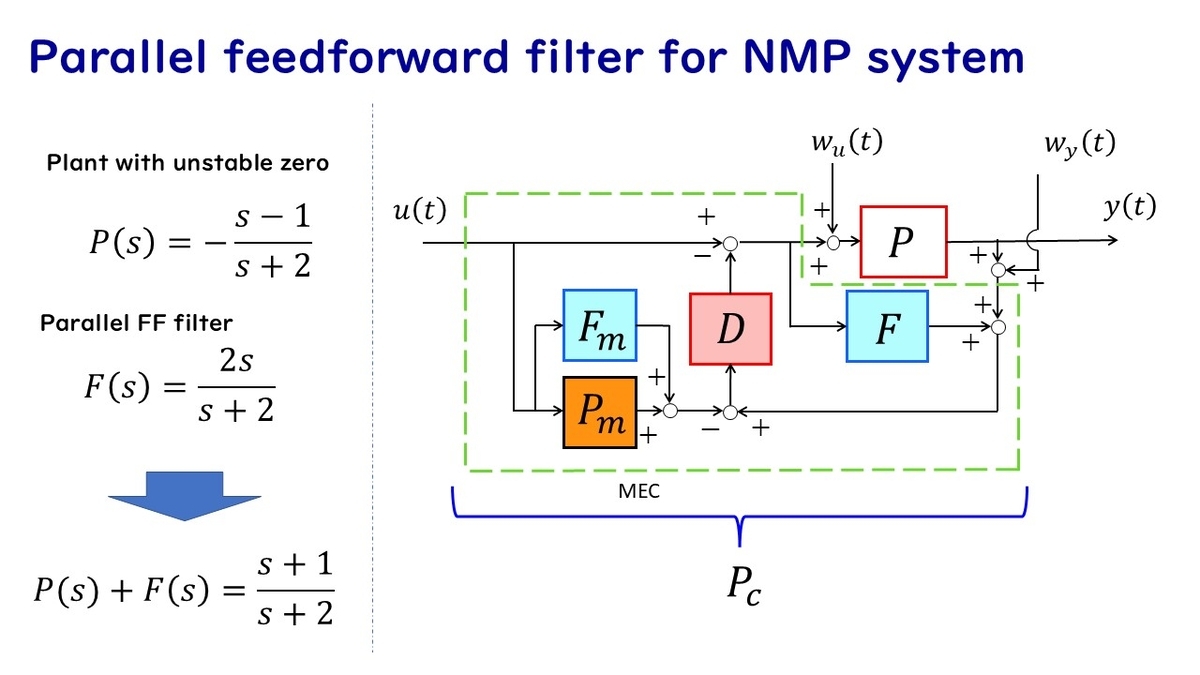
For detailed design methodology, LMI/PSO-based approaches, and MATLAB code, see: MEC for Non-Minimum Phase Systems: Parallel Feedforward Compensator Approach
For the research paper explanations: JCMSI 2017 (PFC structure) | JCMSI 2022 (Polytopic NMP)
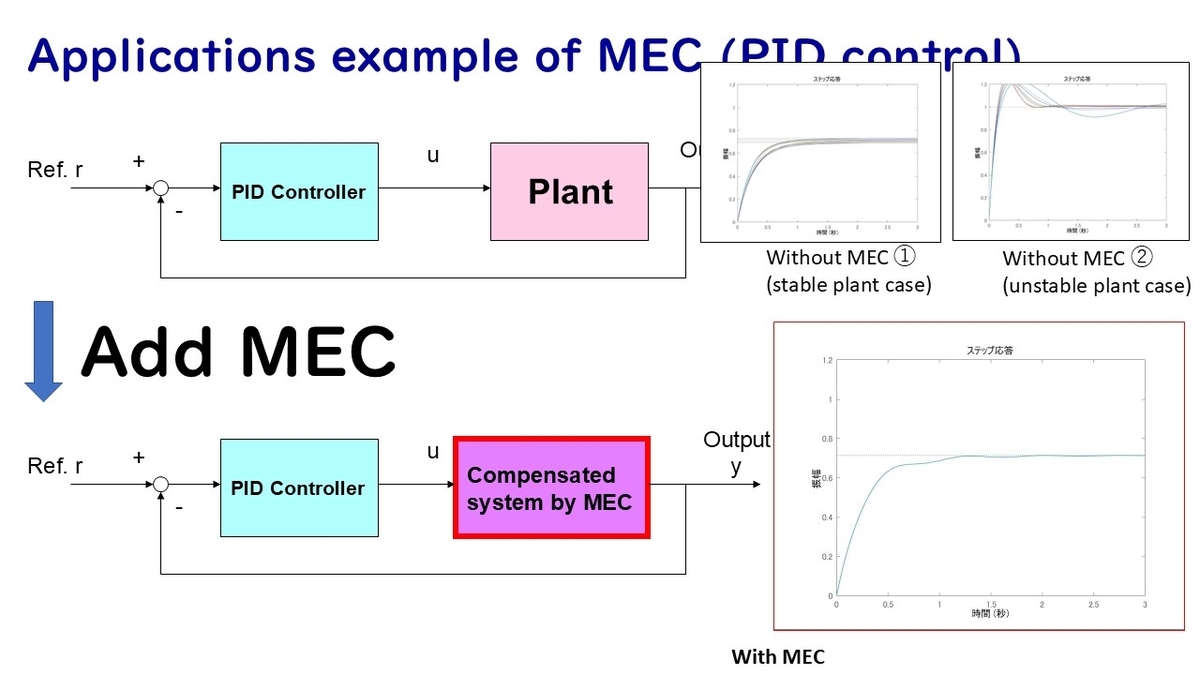
Examples of Integration with Existing Control Systems
MEC can be combined with various existing control methods. The following figure shows examples of integration with PID control, model predictive control, and state feedback control.
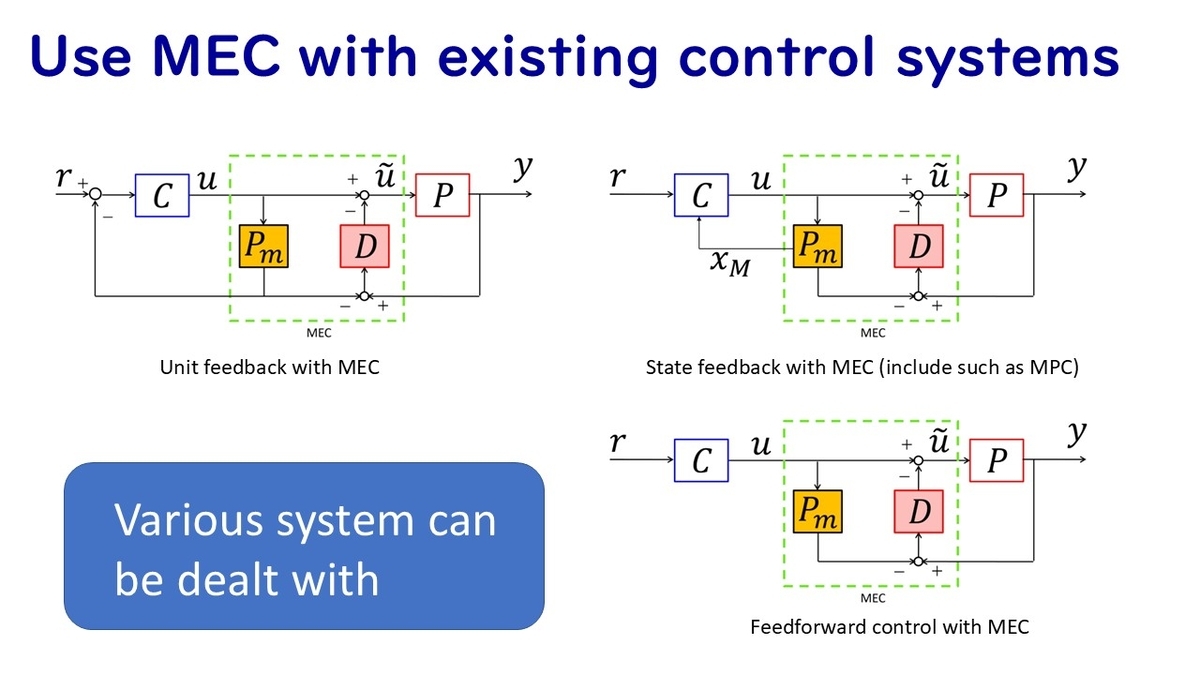
For a detailed case study of MEC + PID with MATLAB code: MEC + PID Control: Adding Robustness to the Most Widely Used Controller
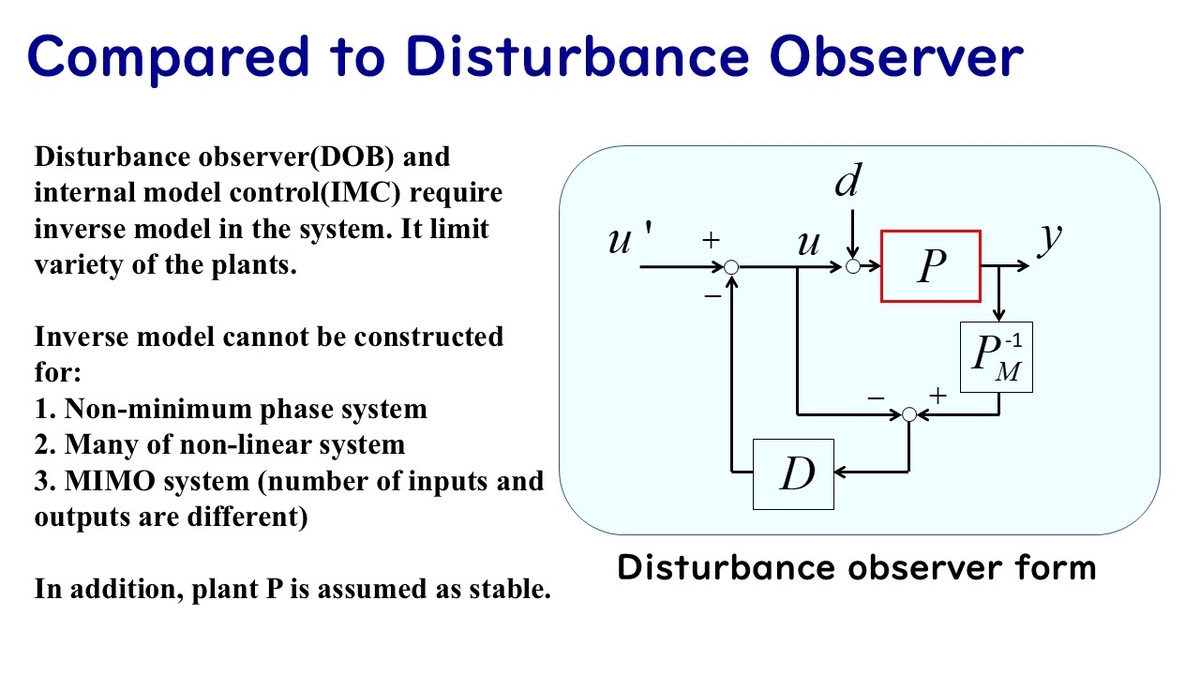
Comparison between Disturbance Observer and Model Error Compensator
MEC and Disturbance Observer (DOB) share similar goals but differ in structure. The key differences are:
- DOB: Requires inverse model; uses filters close to gain 1 and zero phase lag
- MEC: Does not require inverse model; uses high-gain filters
MEC can handle a wide range of systems including nonlinear systems and non-minimum phase systems because it does not require an inverse model.
Limitations and trade-offs of MEC: The high-gain feedback used in MEC amplifies sensor noise. When the plant output contains significant measurement noise, the error compensator gain must be limited, resulting in a trade-off between robustness improvement and noise rejection. Additionally, for plants with relative degree greater than 1, a direct high-gain error compensator cannot be applied; instead, the error compensator must be designed as a proper transfer function of appropriate order. For non-minimum phase plants, the additional PFC structure is required (see above). These design trade-offs are addressed systematically using LMI-based methods in JCMSI 2021 and sensor noise design in MATLAB_MEC02_sensor_noise.
For a detailed structural comparison with block diagrams and design guidelines, see: Model Error Compensator vs Disturbance Observer: A Structural Comparison
For the broader perspective on how MEC, DOB, and IMC relate within the model-based compensation framework, see also: Internal Model Control and MEC: From IMC to Add-On Robustness
Relationship between Robust Control and Model Error Compensator
In many robust control methods such as H∞ control and μ-synthesis, the controller is designed to optimize worst-case performance over a set of uncertain plants. These methods can handle a wide variety of performance specifications through appropriate weight selection. However, the resulting controller is typically designed as a single integrated unit — both the nominal performance and the robustness are embedded together in one controller, making it difficult to improve robustness without potentially affecting the nominal performance.
In contrast, MEC takes a modular approach: the error compensator D is added to an existing control system, and its role is specifically limited to suppressing the model error signal. The original controller handles nominal performance, while MEC handles robustness enhancement. This separation means that the existing controller does not need to be redesigned, and the error compensator can be designed independently. The error compensator D can also be designed using tools from robust control, including LMI-based approaches that account for polytopic-type uncertainty. See: MEC Design for Polytopic Uncertainty (JCMSI 2021)
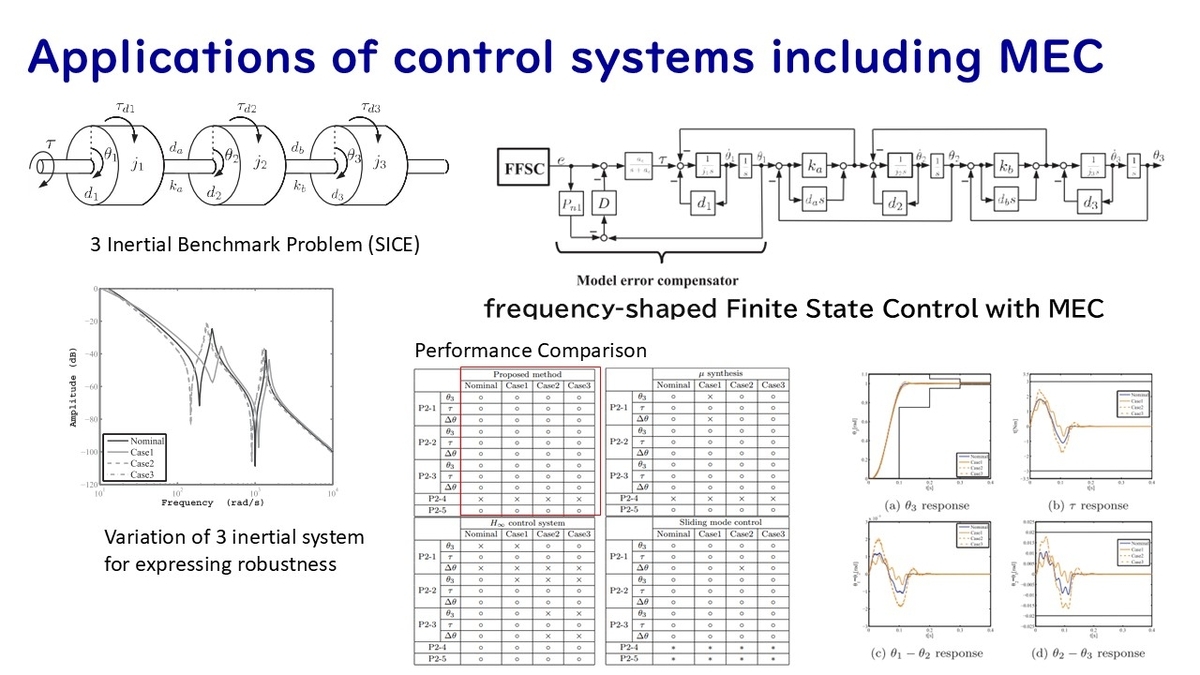
Application Examples
MEC has been applied to various practical systems including benchmark problems and electric wheelchairs (where dynamics change significantly with passengers).

Summary and Outlook
The Model Error Compensator (MEC) provides a modular, add-on approach to robustness enhancement for control systems. Its key features are:
- Add-on structure: MEC can be added to any existing control system without modifying the original controller.
- No inverse model required: Unlike DOB, MEC uses the model error signal directly, enabling application to non-minimum phase and nonlinear plants.
- Broad applicability: Demonstrated for SISO and MIMO systems, minimum and non-minimum phase plants, linear and nonlinear systems, and in combination with PID, MPC, and state feedback controllers.
- Systematic design: LMI-based and PSO-based design methods are available for handling polytopic-type uncertainty.
Known limitations include the trade-off between robustness and sensor noise amplification inherent in high-gain feedback, the need for a parallel feedforward compensator (PFC) for non-minimum phase plants, and the requirement that the nominal model be of sufficient accuracy for the error compensation to be effective. Ongoing and future research directions include extending MEC to multi-rate sensing environments (see System Identification Hub and Observer Hub), data-driven tuning of the error compensator, and integration with model predictive control.
Related Topics
MEC connects to several other areas in control engineering. The following articles provide context on the techniques and methods that interact with MEC:
- System Identification: From Data to Dynamical Models — Obtaining the plant model used in MEC
- State Observer and State Estimation — Observer design using identified models; MEC can compensate observer-based controllers
- Linear Matrix Inequalities (LMIs) and Controller Design — LMI tools used in MEC design
- Discretization of Continuous-Time Control Systems — Continuous/discrete MEC implementation
MEC MATLAB Code (Github)
MATLAB code related to MEC is available on Github:
- Robust-control-MATLAB_MEC01 — Basic MEC with LMI/PSO design (JCMSI 2021, 2022)
- MATLAB_MEC02_sensor_noise — Sensor noise trade-off design
- MATLAB_MEC03_withPFC — Parallel feedforward compensator for NMP systems
- non_linear_control_MATLAB_MEC04 — Robust feedback linearization for nonlinear systems
- MATLAB_MEC05_signal_limitation_filter — Signal limitation filters
- Vehicle_control_MEC05 — Vehicle control application
- MEC05-rengo2022 — PID + MEC integration
Model Error Compensator Videos
The following is a 30-minute video explaining the overall concept of MEC, presented at IFAC World Congress 2023:
Research Achievements of Model Error Compensator
Academic Papers (with Links)
[19] H. Okajima, Model Error Compensator for adding Robustness toward Existing Control Systems, Preprints of the IFAC World Congress, pp. 3998 - 4005 (2023) IFAC-PapersOnLine
[18] 岡島寛,モデル誤差抑制補償器を用いた既存制御系のロバスト化,計測と制御,Vol. 62,No. 3,168-175 (2023)
[17] Ryuichiro Yoshida, Hiroshi Okajima and Takumi Sato, Model error compensator design for continuous- and discrete-time non-minimum phase systems with polytopic-type uncertainties, SICE JCMSI, Volume 15 Issue 2, pp. 141-153 (2022) (Open Access)
[16] R. Yoshida, Y. Tanigawa, H. Okajima and N. Matsunaga, A design method of model error compensator for systems with polytopic-type uncertainty and disturbances,SICE JCMSI, Volume 14, Issue 2 (2021) (Open Access)
[15] H. Okajima, Y. Nakabayashi and N. Matsunaga, Signal-Limitation Filters to Simultaneously Satisfy Constraints of Velocity and Acceleration Signals, SICE JCMSI, Vol.13, No.1, pp.1-8 (2020) (Open Access)
[14] 岡島寛:ポリトープ型不確かさを有するCT-LTIシステムに対するMECのロバスト性能解析,SICE論文集,Vol.55, No.12 (2019)
[13] 岡島寛,奥村洸祐,松永信智:MECを用いた車輪型倒立振子のロバスト速度補償,電気学会論文誌(C), Vol.139, No.3 (2019)
[12] 松永信智,坂本将一,田中友樹,岡島寛:MECを用いたSSV型パーソナルビークルの操縦支援制御系の設計と屋外走行評価,機械学会論文集C編,Vol.84,No.858 (2018)
[11] 岡島寛,中林佑多,松永信智:任意信号に対して速度・加速度を制約する信号制限フィルタの設計,SICE論文集,Vol.54, No.1,pp.146-152 (2018)
[10] 奥村洸祐,岡島寛,松永信智:センサノイズ環境下でのMECの設計,システム制御情報学会論文誌,Vol.30,No.4,pp.153-155 (2017)
[9] G. Ichimasa, H. Okajima, K. Okumura and N. Matsunaga:Model Error Compensator with Parallel Feed-Forward Filter, SICE JCMSI,Vol.10, No.5, pp.468-475 (2017) (Open Access)
[8] 岡島寛,松永信智:MECに基づくロバスト経路追従制御,システム制御情報学会論文誌,Vol.29,No.10,pp.466-468(2016)
[7] 菅野達也,壇裕介,岡島寛,松永信智:MECによる福祉用パーソナルビークルのロバストな屋内隊列走行システム,機械学会論文集(C), Vol.82, No.840 (2016)
[6] 岡島寛,一政豪,松永信智:非最小位相系に対するMECの設計,SICE論文集,Vol.51, No.11, pp.794-801 (2015)
[5] 藤岡巧,岡島寛,松永信智:MECと周波数整形型終端状態制御の併用による3慣性ベンチマーク問題の一解法,SICE論文集,Vol.50, No.12, pp.861-868 (2014)
[4] 岡島寛,西村悠樹,松永信智:モデル誤差抑制補償に基づく非線形システムのフィードバック線形化,SICE論文集,Vol.50, No.12, pp.869-874 (2014)
[3] 梅井啓紀,岡島寛,松永信智,浅井徹:MECの多入出力システムに対する設計,システム制御情報学会論文誌,Vol.27, No.2, pp.67-72 (2014)
[2] 丸野裕太郎,A. T. Zengin,岡島寛,松永信智,中村憲仁:モデル誤差補償による福祉用前輪駆動型パーソナルビークルSTAViの操縦特性の改善,JSME(C編), Vol.79, No.808, pp.4721-4733 (2013)
[1] H. Okajima, H. Umei, N. Matsunaga and T. Asai:A Design Method of Compensator to Minimize Model Error,SICE JCMSI, Vol.6, No.4, pp.267-275 (2013) (Open Access)
Research on Model Error Compensator by Other Research Groups
MEC has been adopted by multiple independent research groups for applications including quadcopters, teleoperation, torsion torque control, underwater robots, power electronics, and data-driven tuning. For a comprehensive survey, see: (D1 article link to be added upon publication)
Selected publications by other groups:
- A. Haddi, M. E. Azzouzi and M. Laabissi, A design approach of fractional model error compensator for fractional dynamical systems, Circuits, Systems, and Signal Processing, Vol. 43, pp. 7611-7633 (2024)
- 川田昌克, 零点と不安定極をもたない2次系に対するDOBとMECの関係について, SICE論文集, Vol. 60, No. 2 (2024)
- R. Nishio et al., Experiments on resolved acceleration control of a 3-link dual-arm underwater robot with MEC, Artificial Life and Robotics (2025)
Self-Introduction
Hiroshi Okajima (Associate Professor, Graduate School of Science and Technology, Kumamoto University). Member of SICE, ISCIE, and IEEE.
