This article explains how to apply the Model Error Compensator (MEC) to nonlinear systems through a robust feedback linearization approach. Feedback linearization is a powerful technique for controlling nonlinear systems, but it is vulnerable to model errors because it relies on canceling nonlinear terms. MEC resolves this vulnerability by making the effective plant dynamics close to the nominal linear model, achieving robust linearization as an output feedback type method. Related articles, related papers, and MATLAB links are placed at the bottom.
Author: Hiroshi Okajima, Associate Professor, Kumamoto University, Japan — 20 years of control engineering research
This article is based on the following papers.
- Okajima, Model Error Compensator for adding Robustness toward Existing Control Systems, IFAC PapersOnLine, Vol. 56, Issue 2, pp. 3998–4005 (2023) (Free access, Elsevier)
岡島寛, 西村悠樹, 松永信智, モデル誤差抑制補償に基づく非線形システムのフィードバック線形化, 計測自動制御学会論文集, Vol. 50, No. 12, pp. 869–874 (2014)
Co-authors: Yuki Nishimura and Nobutomo Matsunaga (Kumamoto University) for the SICE 2014 paper.
- Why Nonlinear Systems Are Challenging
- MEC-Based Robust Feedback Linearization
- Application Example: Robust Path Following Control
- Generalized Robust Feedback Linearization (IFAC 2023)
- Comparison: MEC vs Standard Feedback Linearization
- Comparison: MEC vs Disturbance Observer for Nonlinear Systems
- Connections to Related Research
- MATLAB Code
- Related Articles and Videos
- Paper Information
- ModelErrorCompensator #MEC #NonlinearControl #FeedbackLinearization #RobustControl #ControlEngineering #MATLAB #OutputFeedback #VehicleControl #PathFollowing
Why Nonlinear Systems Are Challenging
The Problem with Feedback Linearization
Many practical control systems exhibit nonlinear dynamics: robotic manipulators, chemical reactors, automotive engines, and power electronics are all inherently nonlinear. Feedback linearization is one of the most powerful approaches for controlling such systems. The idea is to apply a nonlinear state feedback that cancels the nonlinear terms in the system dynamics, resulting in an equivalent linear system that can be controlled using standard linear control techniques.
However, feedback linearization has two critical limitations:
Model error sensitivity: The method cancels nonlinear terms using the known model of the nonlinear system. If the model is inaccurate (which is always the case in practice), the cancellation is imperfect, and residual nonlinear dynamics remain. This can significantly degrade performance or even destabilize the system.
Full state requirement: Standard feedback linearization requires all state variables to be measured or estimated, which may not be feasible in many applications.
How MEC Addresses Both Limitations
The MEC-based approach to nonlinear control addresses both limitations:
Robustness against model errors: Instead of relying on perfect cancellation of nonlinear terms, MEC feeds back the difference between the actual plant output and the nominal model output. The error compensator drives this difference toward zero, effectively making the plant behave like the linear model regardless of the model accuracy.
Output feedback: The MEC structure uses only the output signal of the plant (not all state variables), making it an output feedback type linearization method. The nominal model, running in parallel with the plant, provides the state information needed for the linear controller design.
MEC-Based Robust Feedback Linearization
Nonlinear System Model
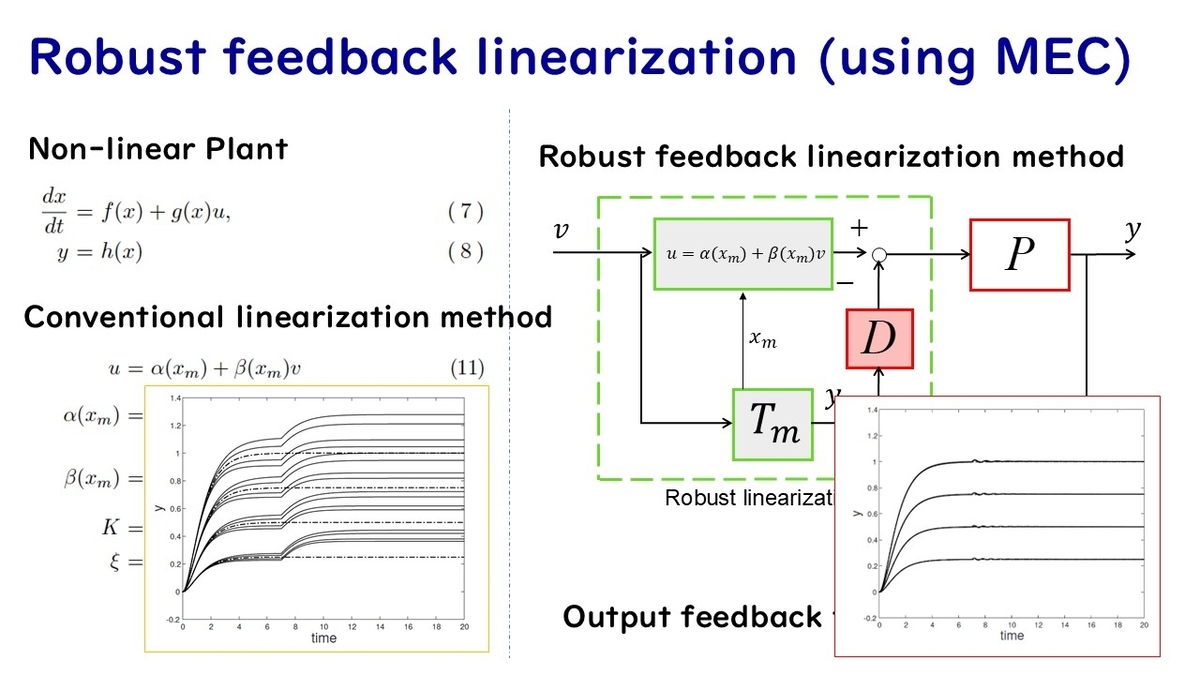
Consider a general single-input single-output (SISO) nonlinear system in the form:
where is the state,
is the input, and
is the output.
Standard Feedback Linearization
In standard feedback linearization, a nonlinear control law is designed as:
where denotes the
-th Lie derivative of
along
,
is the relative degree, and
is the new input for the linearized system. When the model is exact, this yields the linear input-output relationship:
where denotes the
-th derivative of the output. A linear controller can then be designed for this integrator chain.
The problem: If the functions and
contain model errors, the cancellation is imperfect and the linearized system retains nonlinear residual dynamics.
MEC Approach: Robust Linearization
Instead of attempting to perfectly cancel the nonlinear terms, the MEC approach works as follows:
Nominal linear model: A linear model
is chosen as the desired input-output dynamics. This can be a simple integrator chain or any suitable linear model.
MEC structure: The MEC is applied between the controller output and the nonlinear plant input. The error compensator
feeds back the difference between the actual nonlinear plant output and the nominal linear model output.
High-gain error compensation: When
Linear controller design: A linear controller
(e.g., PID, state feedback, optimal control) is designed for the nominal model
Advantages Over Standard Feedback Linearization
The MEC-based approach provides several advantages:
- No exact model required: The approach does not rely on canceling specific nonlinear terms. It works by making the overall input-output behavior match the linear model, regardless of the form of nonlinearity.
- Output feedback: Only the output
is needed from the actual plant. The states of the nominal linear model (which runs in the controller) provide state information for the linear controller design.
- Structural simplicity: The error compensator
- Robustness against parameter variations: Since the MEC continuously corrects the output discrepancy, it inherently compensates for time-varying parameters and disturbances.
Application Example: Robust Path Following Control
One practical application of MEC for nonlinear systems is robust path following control for vehicles. Vehicle dynamics are inherently nonlinear due to tire-road interactions, and the dynamics change significantly with speed, road conditions, and payload.
The MEC-based approach linearizes the vehicle dynamics to a nominal model, and then a linear path-following controller is designed for this model. The MEC compensates for the discrepancy between the nominal model and the actual vehicle dynamics, including parameter variations in tire characteristics and load conditions.
For details on this application, see: 岡島寛, 松永信智, モデル誤差抑制補償器に基づくロバスト経路追従制御, システム制御情報学会論文誌, Vol. 29, No. 10, pp. 466–468 (2016).
MATLAB code for this application is available at GitHub: Vehicle_control_MEC05.
Generalized Robust Feedback Linearization (IFAC 2023)
The IFAC 2023 paper by Okajima presents a generalized version of the robust feedback linearization using MEC. The generalized formulation:
- Extends the approach to a broader class of nonlinear systems
- Provides a unified framework that encompasses both the standard MEC-based linearization and its extensions
- Demonstrates effectiveness through numerical examples
This generalized version is discussed in the IFAC paper: H. Okajima, Model Error Compensator for adding Robustness toward Existing Control Systems, IFAC PapersOnLine, Vol. 56, Issue 2, pp. 3998–4005 (2023).
Comparison: MEC vs Standard Feedback Linearization
| Aspect | Standard Feedback Linearization | MEC-Based Robust Linearization |
|---|---|---|
| Model accuracy requirement | Exact model needed for cancellation | Approximate model sufficient |
| State requirement | Full state feedback (all states needed) | Output feedback only |
| Robustness to model error | Sensitive — imperfect cancellation degrades performance | Robust — error compensator continuously corrects |
| Computational complexity | Lie derivative computation, relative degree analysis | Linear error compensator design |
| Applicable controller types | Linear controller for the linearized system | Any controller (PID, MPC, optimal, etc.) |
| Non-minimum phase nonlinear systems | Challenging (zero dynamics issues) | PFC approach can be applied |
Comparison: MEC vs Disturbance Observer for Nonlinear Systems
The Disturbance Observer (DOB) is also used for robustifying nonlinear control systems. However:
- DOB for nonlinear systems requires some form of inverse model, which is difficult to obtain for general nonlinear dynamics. While there are extensions of DOB to nonlinear systems, they often require specific structural assumptions.
- MEC for nonlinear systems does not require any inverse model. The error compensator operates on the input-output signals, making it applicable to a wide range of nonlinear systems.
For a detailed comparison between MEC and DOB, see Model Error Compensator vs Disturbance Observer: A Structural Comparison.
Connections to Related Research
Model Error Compensator: Comprehensive Guide — For the full overview of MEC including basic structure and design philosophy, see the MEC hub article.
MEC + PID Control — For the simplest integration of MEC with PID control (for linear systems), see MEC + PID Control: Adding Robustness to the Most Widely Used Controller.
MEC for Non-Minimum Phase Systems — When the system has non-minimum phase characteristics, the parallel feedforward compensator approach is needed. See MEC for Non-Minimum Phase Systems.
MEC vs Disturbance Observer — For a structural comparison with the DOB, see MEC vs DOB: A Structural Comparison.
Benchmark Problem — MEC has been applied to the SICE 3-inertia benchmark problem in combination with frequency-shaped final-state control: T. Fujioka, H. Okajima, N. Matsunaga, モデル誤差抑制補償器と周波数整形型終端状態制御の併用による3慣性ベンチマーク問題の一解法, 計測自動制御学会論文集, Vol. 50, No. 12, pp. 861–868 (2014).
MATLAB Code
- GitHub (Nonlinear MEC — Robust Feedback Linearization): non_linear_control_MATLAB_MEC04
- GitHub (Vehicle Control with MEC): Vehicle_control_MEC05
- GitHub (Basic MEC with LMI): Robust-control-MATLAB_MEC01
Related Articles and Videos
Blog Articles (blog.control-theory.com)
- Model Error Compensator (MEC): Enhance the Robustness of Existing Control Systems
- Model Error Compensator vs Disturbance Observer: A Structural Comparison
- System Identification: Obtaining Dynamical Model
- Linear Matrix Inequalities (LMIs) and Controller Design
- Discretization of Continuous-Time Control Systems
Research Web Pages (www.control-theory.com)
Video
Paper Information
- Okajima, "Model Error Compensator for adding Robustness toward Existing Control Systems", IFAC PapersOnLine, Vol. 56, Issue 2, pp. 3998–4005, 2023. DOI: 10.1016/j.ifacol.2023.10.1098 (Free access)
岡島寛, 西村悠樹, 松永信智, 「モデル誤差抑制補償に基づく非線形システムのフィードバック線形化」, 計測自動制御学会論文集, Vol. 50, No. 12, pp. 869–874, 2014.
岡島寛, 松永信智, 「モデル誤差抑制補償器に基づくロバスト経路追従制御」, システム制御情報学会論文誌, Vol. 29, No. 10, pp. 466–468, 2016.
Self-Introduction
Hiroshi Okajima — Associate Professor, Graduate School of Science and Technology, Kumamoto University. Member of SICE, ISCIE, and IEEE.
If you found this article helpful, please consider bookmarking or sharing it.
