ここでは、モデル誤差抑制補償器(Model Error Compensator, MEC)の効果を確認するための数値例として共振特性を持つ2次システムのシミュレーション結果を示します。共振周波数付近でのモデル誤差に対するMECの効果を検証します。
モデル誤差抑制補償器についての説明は以下の記事をご覧下さい。
制御対象と問題設定
ここでは、制御対象として次の共振特性を持つ対象を扱います。
ここで、本記事ではとし、
の取りうる範囲をそれぞれ
とします。分母の定数項15により、共振周波数は約
となります。
この制御対象は、機械系システムでよく見られる共振特性を模擬しており、制御設計において注意が必要な典型的なシステムです。
制御対象の周波数特性
まず、モデル誤差を含む10種類の制御対象の周波数特性(ボード線図)を示します。

共振ピークの位置や大きさにバラツキが生じていることが確認できます。このような特性のバラツキは、制御性能の劣化や安定性の問題を引き起こす可能性があります。
MECなしの場合
まず、誤差がない場合についてフィードバック比例制御器を施した結果を示します。ブロック線図は以下のようになります。

次に制御結果(ステップ応答)が以下のようになります。

応答のバラツキが確認できます。今回は4つの変数を変えていますので、ばらつき方にバリエーションがあります。
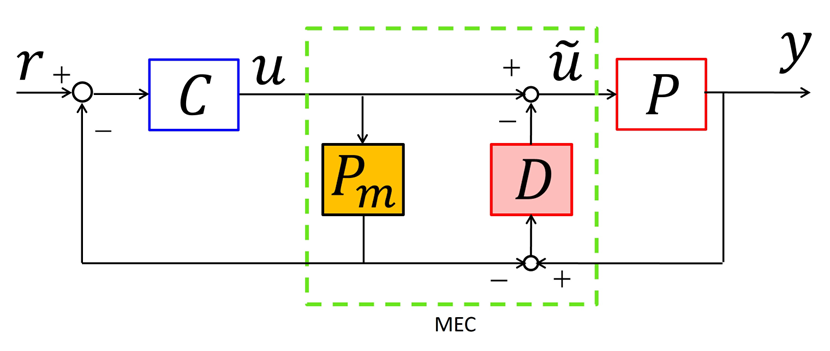
次に、誤差補償器を次のように定めてMECを構築した場合の結果を示します。
誤差補償器はPI制御構造にしており、ハイゲインフィードバックとなっています。MECを含む制御構造は次のように与えられます。
このとき、得られた応答波形は次のようになります。

MECを用いることで、バラツキが劇的に少なくなっていることが確認できます。
MECを含む制御系を構成することにより、共振特性のバラツキ()の影響が出力にはほとんど現れていないことが確認できます。特に、共振周波数の変動による制御性能への影響が大幅に抑制されています。
MATLABシミュレーションコード
最後に、本記事のシミュレーションで使用したMATLABコードを示します。
まとめ
共振特性を持つ制御対象についてMECの効果を確認しました。共振周波数や減衰比のバラツキを含む系に対してもMECが効果的にモデル誤差を補償し、安定した制御性能を実現することが示されました。
特に機械系や構造系システムにおいて、共振特性は避けて通れない現象です。MECを適用することで、これらのシステムにおけるロバスト性の向上が期待できます。
関連記事
自己紹介
岡島 寛 (熊本大学工学部情報電気工学科准教授)
制御工学の研究をしています。モデル誤差抑制補償器,状態推定,量子化制御など
研究室HP
岡島研究室(システム制御 control-theory.com)
制御動画ポータルサイト
制御工学チャンネル(伝達関数・状態方程式・MATLABなど)
電気動画ポータルサイト
本記事をお読みいただきありがとうございます。役に立った、と思われましたら、ブックマーク・シェア等のアクションをしていただければ嬉しいです。
