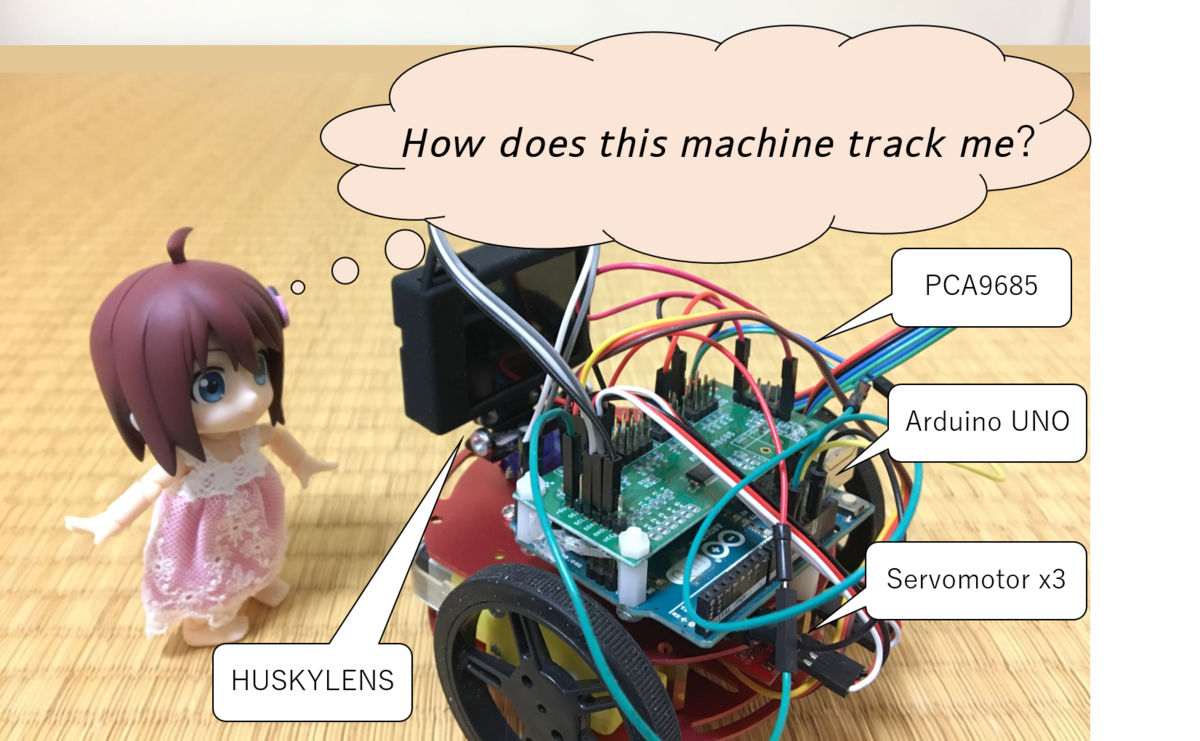
HUSKYLENSを試してみた。Arduinoで簡単プログラミング! - Ar-Rayのてく日記 で、HUSKYLENSをサーボモータに取り付けましたが、これを2輪の台車に取り付けて自在に動かしてみました。
ソースコードと配線先についてはGithubリポジトリに上げています。
部品は全て秋月で買えます。
バッテリーは、2cell(7.4V) 300mAhを用いています。ただし、すぐに残量が少なくなってしまうのでこまめに電圧は確認しましょう。
モータは全てArduinoがサーボコントローラをI2Cで制御することでで動作させています。小さいPWM出力でもモータが速く回ってしまうため、十分に制御ができたわけではありませんが、カメラの方向に台車が回転していることが分かります。何とかアルゴリズムを改善させたいです。
台車のモータは、普通にモータドライバを使ったほうがよかったなー…
